Paper:
The WiFly: Flapping-Wing Small Unmanned Aerial Vehicle with Center-of-Gravity Shift Mechanism
Taichi Nozawa*, Keita Nakamura*, Ryosuke Katsuyama*, Shunki Kuwajima*, Ziyan Li*, Akira Nomizu*, Riku Okamoto*, Toshitatsu Munakata**, and Takanobu Watanabe*
*Faculty of Science and Engineering, Waseda Univesity
3-4-1 Okubo, Shinjuku-ku, Tokyo 169-8555, Japan
**Micro Aircraft Research Institute
2-22-6 Ouzenji Nishi, Asou-ku, Kawasaki-shi, Kanagawa 215-0017, Japan

This paper describes the development of a flapping-wing unmanned aerial vehicle (UAV) named WiFly, which is equipped with a center-of-gravity (COG) shift mechanism. This mechanism allows seamless changes in the flight attitude between hovering and level flight by controlling the pitch angle. We implemented two types of feedback control systems in WiFly: PID control and reinforcement learning (shallow Q-learning) to stabilize the flight attitude. The controllability of WiFly is drastically improved by employing a double-motor drive system to independently control the flipping frequencies of the left and right wings.
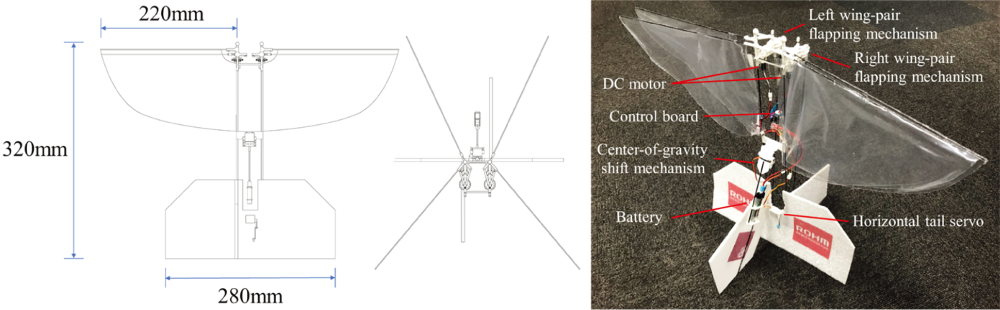
The developed flapping-wing type UAV with centre-of-gravity shift mechanism
- [1] J. M. McMichael and M. S. Francis, “Micro Air Vehicles – Toward a new Dimension in Flight,” DARPA document, 1997.
- [2] T. Tomic et al., “Toward a fully autonomous UAV: Research platform for indoor and outdoor urban search and rescue,” IEEE Robotics and Automation Magazine, Vol.19, No.3, pp. 46-56, 2012.
- [3] Y. Miyazaki, T. Hirano, T. Kobayashi, Y. Imai, S. Usuki, Y. Kobayashi, K. Terabayashi, and K. T. Miura, “Acquisition of Disaster Emergency Information Using a Terrain Database by Flying Robots,” J. Robot. Mechatron., Vol.30, No.3, pp. 443-452, 2018.
- [4] T. J. Mueller, “Fixed and Flapping Wing Aerodynamics for Micro Air Vehicle Applications,” the American Institute of Aeronautics and Astronautics (AlAA), 2000.
- [5] K. Nonami, “Research and Development of Drone and Roadmap to Evolution,” J. Robot. Mechatron., Vol.30, No.3, pp. 322-336, 2018.
- [6] M. Karásek, F. T. Muijres, C. de Wagter, B. D. W. Remes, and G. C. H. E. de Croon, “A tailless aerial robotic flapper reveals that flies use torque coupling in rapid banked turns,” Science, Vol.361, Issue 6407, pp. 1089-1094, 2018.
- [7] M. J. Lighthill, “On the Weis-Fogh mechanism of lift generation,” J. of Fluid Mechanics, Vol.60, pp. 1-17, 1973.
- [8] C. P. Ellington, C. van den Berg, A. P. Willmott, and A. L. R. Thomas, “Leading-edge vortices in insect flight” Nature, Vol.384, pp. 626-630, 1996.
- [9] S. Deng, M. Percin, B. W. van Oudheusden, B. D. W. Remes, H. Bijl, and T. Xiao, “Numerical Simulation of a Flexible X-wing Flapping-Wing Micro Air Vehicle,” AIAA J., Vol.55, No.7, pp. 2295-2306, 2017.
- [10] G. C. H. E. de Croon, M. A. Groen, C. de Wagter, B. D. W. Remes, R. Ruijsink, and B. W. van Oudheusden, “Design, aerodynamics and autonomy of the DelFly,” Bioinspiration and Biomimetics, Vol.7, No.2, 025003, 2012.
- [11] S. Deng, B. W. van Oudheusden, B. D. W. Remes, M. Percin, H. Bijl, and H. M. Ruijsink, “Experimental Investigation of the Flapping Performance on ‘Delfly Micro,” Int. Micro Air Vehicle Conf. and Flight Competition (IMAV2013), pp. 17-20, 2013.
- [12] S. Deng and B. W. van Oudheusden, “Wake structure visualization of a flapping-wing Micro-Air-Vehicle in forward flight,” Aerospace Science and Technology, Vol.50, pp. 204-211, 2016.
- [13] T. Nakata, H. Liu, T. Tanaka, N. Nashihashi, X. Wang, and A. Sato, “Aerodynamics of a bio-inspired flexible flapping-wing micro air vehicle,” Bioinspiration and Biomimetics, Vol.6, No.4, 045002, 2011.
- [14] T. Sato, A. Fujimura, and N. Takesue, “Three-DoF Flapping-Wing Robot with Variable-Amplitude Link Mechanism,” J. Robot. Mechatron., Vol.31, No.6, pp. 894-904, 2019.
- [15] M. T. Keennon, K. Klingebiel, H. Won, and A. Andriukov, “Development of the Nano Hummingbird: A Tailless Flapping Wing Micro Air Vehicle,” 50th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, 2012.
- [16] H. V. Phan, S. Aurecianus, T. S. Kang, and H. C. Park, “Attitude Control Mechanism in an Insect-like Tailless Two-winged Flying Robot by Simultaneous Modulation of Stroke Plane and Wing Twist,” Int. Micro Air Vehicle Conf. and Flight Competition, 2018.
- [17] A. Roshanbin, H. Altartouri, M. Karásek, and A. Preumont, “Colibri: A hovering flapping twin-wing robot,” Int. J. of Micro Air Vehicles, Vol.9, Issue 4, pp. 270-282, 2017.
- [18] K. Y. Ma, P. Chirarattananon, S. B. Fuller, and R. J. Wood, “Controlled flight of a biologically inspired insect-scale robot,” Science, Vol.340, pp. 603-607, 2013.
- [19] J. Zhang, Z. Tu, F. Fei, and X. Deng, “Geometric flight control of a hovering robotic hummingbird,” 2017 IEEE Conf. on Robotics and Automation (ICRA), pp. 5415-5421, 2017.
- [20] J. Zhang, F. Fei, Z. Tu, and X. Deng, “Design optimization and system integration of robotic hummingbird,” IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 5422-5428, 2017.
- [21] M. A. Groen, B. A. P. Bruggeman, B. D. W. Remes, H. M. Ruijsink, B. W. van Oudheusden, and H. Bijl, “Improving flight performance of the flapping wing MAV Delfly II,” Proc. of the Int. Micro Air Vehicle Conf. and Flight Competition (IMAV2010), pp. 1-17, 2010.
- [22] S. F. Armanini, J. L. Verboom, G. C. H. E. de Croon, and C. C. De Visser, “Determination of trim curves for a flapping-wing MAV,” Proc. of Int. Micro Air Vehicle Conf. and Flight Competition (IMAV2014), 2014.
- [23] S. F. Armanini, C. C. de Visser, and G. C. H. E. de Croon, “Black-box LTI modelling of flapping-wing micro aerial vehicle dynamics,” AIAA Atmospheric Flight Mechanics Conf., 2015.
- [24] J. L. Verboom, S. Tijmons, C. de Wagter, B. D. W. Remes, R. Babuska, and G. C.H. E. de Croon, “Attitude and altitude estimation and control on board a Flapping Wing Micro Air Vehicle,” IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 5846-5851, 2015.
- [25] K. Y. W. Scheper, S. Tijmons, C. C. de Visser, and G. C. H. E. de Croon, “Behavior Trees for Evolutionary Robotics,” Artificial Life, Vol.22, Issue 1, pp. 23-48, 2016.
- [26] S. Tijmons, C. de Wagter, B. D. W. Remes, and G. C. H. E. de Croon, “Autonomous Door and Corridor Traversal with a 20-Gram Flapping Wing MAV by Onboard Stereo Vision,” Aerospace, Vol.5, No.3, p. 69, 2018.
- [27] J. A. Koopmans, S. Tijmons, C. de Wagter, and G. C. H. E. de Croon, “Passively Stable Flapping Flight From Hover to Fast Forward Through Shift in Wing Position,” Int. J. of Micro Air Vehicles, Vol.7, Issue 4, pp. 407-418, 2015.
- [28] G. Ise, D. Yoda, C. Takiguchi, N. Shigematsu, T. Shiratori, H. Nakano, W. Jeon, T. Nozawa, K. Iwashiro, T. Nishino, T. Munakata, and T. Watanabe, “Controlling The Aerial Posture of a Flapping-wing Micro Air Vehicle by Shifting Its Centre of Gravity,” Int. Micro Air Vehicle Conf. and Flight Competition, 2018.
- [29] W. E. Green and P. Y. Oh, “Autonomous hovering of a fixed-wing micro air vehicle,” IEEE Int. Conf. on Robotics and Automation (ICRA 2006), pp. 2164-2169, 2006.
- [30] V.-Q. Nguyen, M. Syaifuddin, H. C. Park, D. Y. Byun, N. S. Goo, and K. J. Yoon, “Characteristics of an Insect-mimicking Flapping System Actuated by a Unimorph Piezoceramic Actuator,” J. of Intelligent Material Systems and Structures, Vol.19, No.10, pp. 1185-1193, 2008.
- [31] R. S. Sutton and A. G. Barto, “Reinforcement Learning: An Introduction,” MIT Press, 1998.
- [32] V. Mnih, K. Kavukcuoglu, D. Silver et al., “Human-level control through deep reinforcement learning,” Nature, Vol.518, pp. 529-533, 2015.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.