Paper:
Study on Automatic Operation of Manual Wheelchair Prototype and Basic Experiments
Kazuteru Tobita, Yoshihito Shikanai, and Kazuhiro Mima
Shizuoka Institute of Science and Technology
2200-2 Toyosawa, Fukuroi-shi, Shizuoka 437-8555, Japan

In nursing homes, repeatedly guiding several carereceivers in wheelchairs before and after meals is one of the factors that increase the burden on caregivers. A solution to this problem is to incorporate autonomous mobility functions into the wheelchair. Although many autonomous electric wheelchairs have been developed in the past, it is not reasonable to introduce them to all users of nursing homes from the standpoint of cost, charging, and maintenance. In this study, we are developing a detachable robot that can operate a manual wheelchair autonomously. The basic concept, target specifications, and design conditions are defined herein, and the results of basic experiments such as straight-line stability tests, obstacle sensor measurement tests, and self-position estimation are reported. The implementation of autonomous driving functions such as path generation and localization will be promoted in the future.
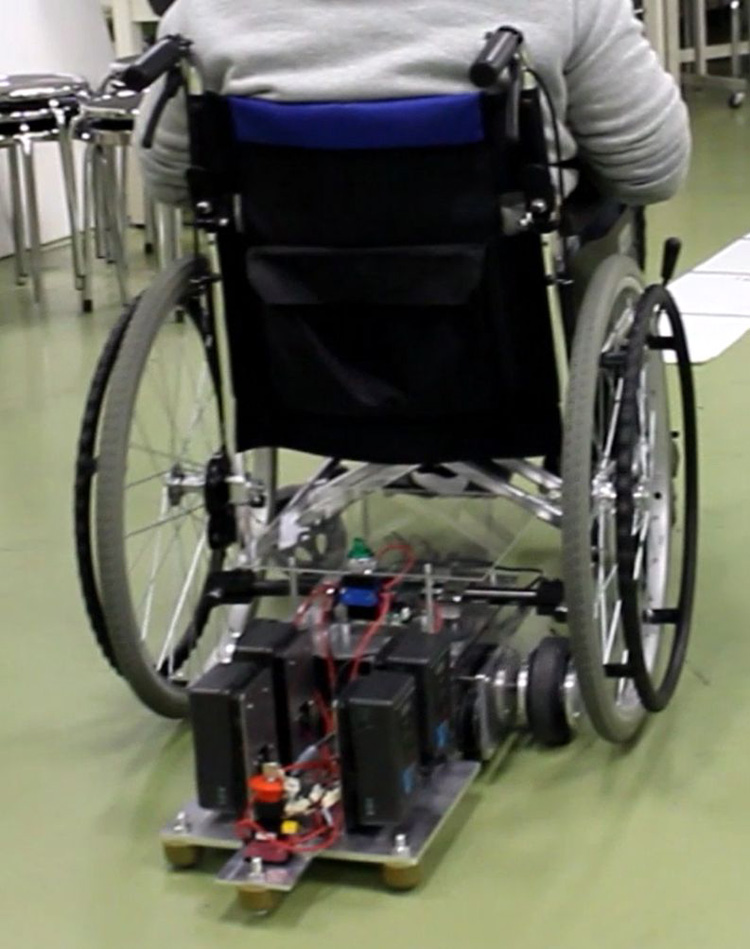
Overview of the prototype
- [1] “Demand Forecast and Expected Supply of Care Staff,” Ministry of Health, Labour and Welfare, 2015.
- [2] F. Pasteau et al., “A visual servoing approach for autonomous corridor following and doorway passing in a wheelchair,” Robotics and Autonomous Systems, Vol.75, pp. 28-40, 2014.
- [3] M. Yokozuka, Y. Suzuki, T. Takei, N. Hashimoto, and O. Matsumoto, “Auxiliary Particle Filter Localization for Intelligent Wheelchair Systems in Urban Environments,” J. Robot. Mechatron., Vol.22, No.6, pp. 758-766, 2010.
- [4] H. Uematsu, N. Imaoka, D. Nguyen, H. Sasai, K. Kitazawa, and T. Ando, “Robotic Personal Mobility Based on Automatic Braking and Autonomous Movement Technologies,” Panasonic Technical J., Vol.64, No.1, pp. 60-65, 2018.
- [5] H. Ikeda, Y. Katsumata, M. Shoji, T. Takahashi, and E. Nakano, “The method of Step Climbing Using a Wheeled Robot and a Wheelchair,” J. of the Robotics Society of Japan, Vol.26, No.2, pp. 80-89, 2008.
- [6] P. Li and C. Zhu, “Development of Power Add-on Unit for Manual Wheelchair – Realization of Force Estimation and Sensor-less Power Assistance –,” Proc. of the 2018 JSME Conf. on Robotics and Mechatronics, 2A2-G04, 2018.
- [7] Health and Welfare Bureau for the Elderly, Ministry of Health, Labour and Welfare, “About setting administration standard instruction guideline of pay nursing home,” 2002.
- [8] H. Nagashima, N. Kato, M. Hosokawa, F. Tachiki, and I. Ito, “Appropriate speed at the time of wheelchair transfer – Derivation of reference speed of wheelchair in ward –,” Annual Meeting of the Japanese Society of National Medical Services, Vol.58, No.1, 168, 2003.
- [9] The Japan Machinery Federation and The Japan Robot Association, “Survey report on safety standard formulation for mobile robots,” 2004.
- [10] T. Fujikawa, “Robot care device safety test method,” Results presentation of Project to Promote the Development and Introduction of Robotic Devices for Nursing Care, 2014.
- [11] K. S. Chong and L. Kleeman, “Mobile-Robot Map Building from an Advanced Sonar Array and Accurate Odometry,” The Int. J. of Robotics Research, Vol.18, No.1, pp. 20-36, 1999.
- [12] H. C. Roh, C. H. Sung, M. T. Kang, and M. J. Chung, “Fast SLAM using polar scan matching and particle weight based occupancy grid map for mobile robot,” Proc. of the 2011 8th Int. Conf. on Ubiquitous Robots and Ambient Intelligence (URAI), Incheon, pp. 756-757, 2011.
- [13] K. Tobita, K. Sagayama, M. Mori, and A. Tabuchi, “Structure and examination of the guidance robot LIGHBOT for visually impaired and elderly people,” J. Robot. Mechatron., Vol.30, No.1, pp. 86-92, 2018.
- [14] Intel RealSense D400 Series Product Family Datasheet Revision 005, January 2019.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.