Paper:
Proposal of Motion Judgment Algorithm Based on Joint Angle of Variable Elastic Assist Suit with High Back Drivability
Seigo Kimura*, Ryuji Suzuki*, Katsuki Machida*, Rie Nishihama**, Manabu Okui*, and Taro Nakamura*
*Department of Precision Mechanics, Faculty of Science and Engineering, Chuo University
1-13-27 Kasuga, Bunkyo-ku, Tokyo 112-8551, Japan
**Research and Development Initiative, Chuo University
1-13-27 Kasuga, Bunkyo-ku, Tokyo 112-8551, Japan

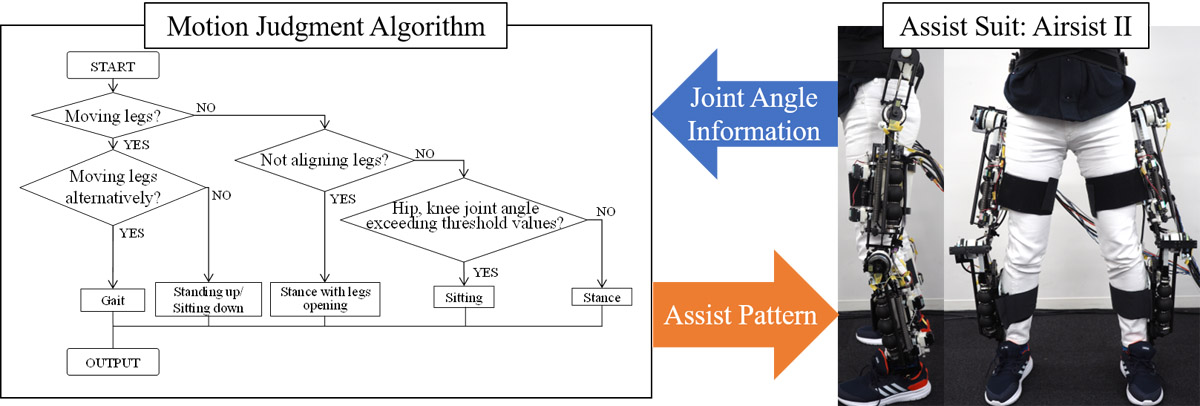
In recent years, the burden per worker has increased due to a decrease in the working population. Wearable assist suits have been developed as one of the methods for solving the problem. To extend the assist suit to practical situations, it is necessary to provide a motion judgment interface for judging the motion of a wearer. Therefore, in our study, a motion judgment algorithm is proposed for assist suits, based on variable viscoelasticity. The proposed algorithm judges sitting, standing-up, stance, sitting-down, and gait using only the joint angle information of the suit and verification is performed using human joint angles obtained by motion capture. Thus, the motion judgment rate is 90% or more for sitting, standing-up, stance, and sitting-down, and 80% or more for gait, confirming the usefulness of motion judgment. Additionally, based on these results, further verification is performed on an actual machine. As a result, in a series of motions starting from the sitting to the standing-up, the stance, and the gait, the motion judgement is successful five times from the sitting to the standing-up, the stance, and once in gait. In a series of motions from sitting to standing-up, the stance, and sitting-down, the motion judgment is successful five times during sitting; five times during sitting, stance, and sitting-down; and three times during standing-up. In this way, it is confirmed that the proposed method can judge the motion only by angle information, although there is a problem in a success rate depending on the motion.
Motion judgment algorithm
- [1] Ministry of Internal Affairs and Communications, “WHITE PAPER Information and Communications in Japan (Year 2016),” pp. 2-4, 2016.
- [2] S. Lee and Y. Sankai, “Power Assist Control for Walking Aid with HAL-3 Based on EMG and Impedance Adjustment around Knee Joint,” Proc. of Intelligent Robots and system, pp. 1499-1504, 2002.
- [3] Y. Sato, J. He, H. Kobayashi, Y. Muramatsu, T. Hashimoto, and H. Kobayashi, “Development and Quantitative Performance Estimation of the Back Support Muscle Suit,” Trans. of the JSME, C, Vol.78, No.792, pp. 2987-2999, 2012 (in Japanese).
- [4] K. Shamaei, P. C. Napolitano, and A. M. Dollar, “Design and functional evaluation of a quasi-passive compliant stance control knee-ankle-foot orthosis,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.22, No.2, pp. 258-268, 2014.
- [5] M. Kashima, H. Arakawa, S. Kimura, R. Nishihama, K. Yokoyama, I. Kikutani, and T. Nakamura, “Development of Assist Suit for Squat Lifting Support Considering Gait and Quantitative Evaluation by Three-Dimensional Motion Analysis,” J. Robot. Mechatron., Vol.32, No.1, pp. 209-219, 2020.
- [6] M. Okui, S. Iikawa, Y. Yamada, and T. Nakamura, “Fundamental characteristic of novel actuation system with variable viscoelastic joints and magneto-rheological clutches for human assistance,” J. of Intelligent Material Systems and Structures, Vol.29, pp. 82-90, 2017.
- [7] S. Iikawa, M. Okui, R. Suzuki, Y. Yamada, and T. Nakamura, “Development of Assistive Device with Variable Joint – Effect of Viscoelasticity on Human Movement and Proposal of Viscoelastic Controller –,” J. of the Robotics Society of Japan, Vol.36, No.8, pp. 567-575, 2018.
- [8] R. Suzuki, M. Okui, S. Iikawa, Y. Yamada, and T. Nakamura, “Evaluation of Wearable Assist Suit Airsist I with Variable Viscoelasticity Control Law in Squatting Motion,” 16th the Robotics Society of Japan, Kasugai, Aichi, September 4-7, 1A1-01, 2018.
- [9] A. Kato and M. Ito, “Visco-Elasticity Change in Human Muscle,” Society of Biomechanisms Japan, pp. 213-220, 1992.
- [10] K. Suzumori, “Backdrivability of Robots and Actuators,” J. of the Robotics Society of Japan, Vol.31, No.6, pp. 548-551, 2013.
- [11] S. Kimura, R. Suzuki, M. Kashima, M. Okui, R. Nishihama, and T. Nakamura, “Assistive method that controls joint stiffness and antagonized angle based on human joint stiffness characteristics and its application to an exoskeleton,” Proc. of the 2019 IEEE 19th Int. Conf. on Advanced Robotics, Belo Horizinte, Brazil, December 2-6, pp. 559-565, 2019.
- [12] H. Kawamoto and Y. Sankai, “Power Assist Method Based on Phase Sequence Driven by Interaction between Human and Robot Suit,” Proc. of the 2004 IEEE Int. Workshop on Robot and Human Interactive Communication, Kurashiki, Okayama, Japan, September 20-22, pp. 491-496, 2004.
- [13] J. V. Paul, D. Pompili, and T. A. Walls, “Human motion recognition using a wireless sensor-based wearable system,” Personal and Ubiquitous Computing, Vol.16, pp. 897-910, doi: 10.1007/s00779-011-0455-4, 2012.
- [14] A. Mannini and A. M. Sabatini, “Machine Learning Methods for Classifying Human Physical Activity from On-Body Accelerometers,” Sensors, Vol.10, pp. 1154-1175, doi: 10.3390/s100201154, 2010.
- [15] A. Tsukahara, Y. Hasegawa, and Y. Sankai, “Standing-Up Motion Support for Paraplegic Patient with Robot Suit HAL,” Proc. of the 2009 IEEE Int. Conf. on Rehabilitation Robotics, Kyoto Int. Conf. Center, Japan, June 23-26, pp. 211-217, 2009.
- [16] Q. Huang, K. Kaneko, K. Yokoi, S. Kaiita, T. Kotoku, N. Koyachi, H. Arai, N. Inamura, K. Komoriya, and K. Tanie, “Balancee Control of a Biped Robot Combining Off-line Pattern with Real-time Modification,” Proc. of the 2000 IEEE Int. Conf. on Robotics & Automation, San Francisco, CA, USA, April, pp. 3346-3352, 2000.
- [17] K. Sano, E. Yagi, and M. Sato, “A Study on Estimation of Walking Intention Using Foot Switches and Hip Joint Angles for Walking Assist of Non-handicapped Persons,” Proc. of the SICE Annual Conf., Nagoya, Japan, September 14-17, pp. 1527-1532, 2013.
- [18] M. Sasayama and T. Murakami, “A Study on Controller Characteristics for Most Efficient Gait Assist System,” IEEE J. of Industry Applications, Vol.3, No.3, pp. 206-213, 2014.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.