Paper:
Model-Based Analysis of Yo-yo Throwing Motion on Single-Link Manipulator
Hokuto Miyakawa, Takuma Nemoto, and Masami Iwase
Tokyo Denki University
5 Senju Asahi-cho, Adachi-ku, Tokyo 120-8551, Japan

This paper presents a method for analyzing the throwing motion of a yo-yo based on an integrated model of a yo-yo and a manipulator. Our previous integrated model was developed by constraining a model of a white painted commercial yo-yo and a model of a plain single-link manipulator with certain constraining conditions placed between two models. However, for the yo-yo model, the collisions between the string and the axle of the yo-yo were not taken into account. To avoid this problem, we estimate some of the yo-yo parameters from the experiments, thereby preserving the functionality of the model. By applying the new integrated model with the identified parameters, we analyze the throwing motion of the yo-yo through numerical simulations. The results of which show the ranges of the release angle and the angular velocity of the joint of the manipulator during a successful throw. In conclusion, the proposed analysis method is effective in analyzing the throwing motion of a manipulator.
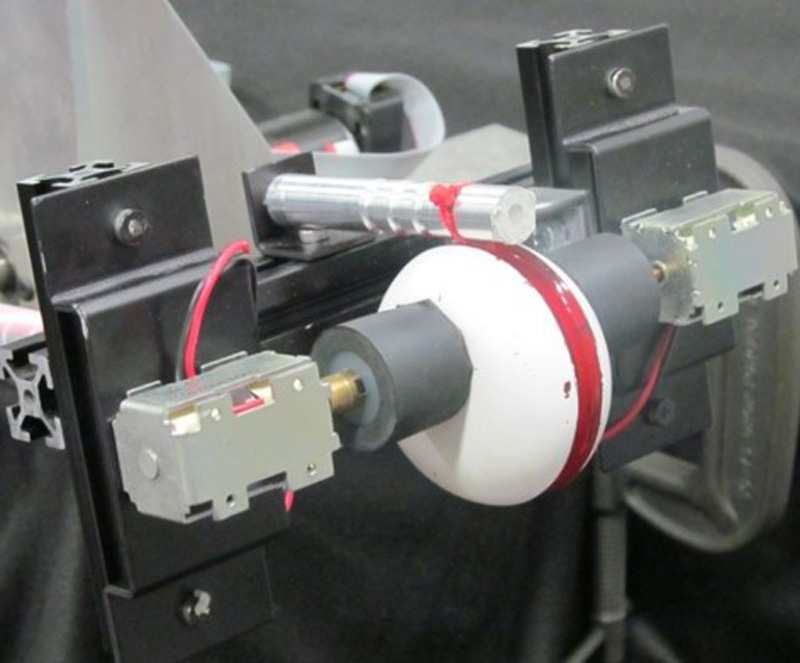
Experimental system with a commercial yo-yo and a single-like manipulator
- [1] S. Katsumata, S. Ichinose, T. Shoji, S. Nakaura, and M. Sampei, “Throwing motion control based on output zeroing utilizing 2-link underactuated arm,” American Control Conf. 2009 (ACC’09), pp. 3057-3064, 2009.
- [2] T. Senoo, Y. Yamakawa, Y. Watanabe, H. Oku, and M. Ishikawa, “High-Speed Vision and its Application Systems,” J. Robot. Mechatron., Vol.26, No.3, pp. 287-301, 2014.
- [3] T. Shoji, S. Nakaura, and M. Sampei, “Throwing motion control of the springed pendubot via unstable zero dynamics,” 2010 IEEE Int. Conf. on Control Applications (CCA), pp. 1602-1607, 2010.
- [4] F. Fontana, P. Reist, and R. D’Andrea, “Control of a swinging juggling robot,” 2013 European Control Conf. (ECC), pp. 2317-2322, 2013.
- [5] T. Kizaki and A. Namiki, “Two ball juggling with high-speed hand-arm and high-speed vision system,” 2012 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 1372-1377, 2012.
- [6] J. Kober, M. Glisson, and M. Mistry, “Playing catch and juggling with a humanoid robot,” 2012 12th IEEE-RAS Int. Conf. on Humanoid Robots (Humanoids), pp. 875-881, 2012.
- [7] C. H. Kim, K. Yonekura, and S. Sugano, “Rope Turning Humanoid Robot System,” J. Robot. Mechatron., Vol.26, No.1, pp. 101-102, 2014.
- [8] B. Nemec, M. Zorko, and L. Zlajpah, “Learning of a ball-in-a-cup playing robot,” 2010 IEEE 19th Int. Workshop on Robotics in Alpe-Adria-Danube Region (RAAD), pp. 297-301, 2010.
- [9] K. Hashimoto and T. Noritsugu, “Design of a Robotic System that Plays with a Yoyo,” J. Robot. Mechatron., Vol.11, No.5, pp. 387-392, 1999.
- [10] K. Mombaur and M. N. Sreenivasa, “HRP-2 plays the yoyo: From human to humanoid yoyo playing using optimal control,” 2010 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 3369-3376, 2010.
- [11] A. Sasaki, H. Hashimoto, S. Yokota, and Y. Ohyama, “Investigation of human motion under conditions with sensory feedbacks restricted in yo-yo control,” SICE 2007 Annual Conf., pp. 3052-3055, 2007.
- [12] H. Arisumi, M. Otsuki, and S. Nishida, “Launching penetrator by casting manipulator system,” 2012 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 5052-5058, 2012.
- [13] H. Arisumi and K. Yokoi, “Collecting an object by casting manipulation,” 2010 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 55-62, 2010.
- [14] H. Arisumi, K. Yokoi, and K. Komoriya, “Kendama game by casting manipulator,” 2005 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2005), pp. 3187-3194, 2005.
- [15] K. Hashimoto and T. Noritsugu, “Modeling and control of robotic yo-yo with visual feedback,” Proc. of 1996 IEEE Int. Conf. on Robotics and Automation, Vol.3, pp. 2650-2655, 1996.
- [16] H.-L. Jin and M. Zackenhouse, “Yoyo dynamics: Sequence of collisions captured by a restitution effect,” J. of Dynamic Systems, Measurement, and Control, Vol.124, No.3, pp. 390-397, 2002.
- [17] H.-L. Jin and M. Zacksenhouse, “Robotic yoyo playing with visual feedback,” IEEE Trans. on Robotics, Vol.20, No.4, pp. 736-744, 2004.
- [18] L. Žlajpah, “Robotic yo-yo: modelling and control strategies,” Robotica, Vol.24, No.02, pp. 211-220, 2006.
- [19] L. Žlajpah and B. Nemec, “Control strategy for robotic yo-yo,” Proc. of 2003 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2003), Vol.1, pp. 767-772, 2003.
- [20] H. Miyakawa, T. Nemoto, and M. Iwase, “Modeling and control for realization of forward-pass yoyo operation by robot arm,” 2014 10th France-Japan/8th Europe-Asia Congress on Mecatronics (MECATRONICS), pp. 394-399, 2014.
- [21] T. Nemoto, T. Sakuma, M. Iwase, and S. Hatakeyama, “Realization of yoyo operation called long-sleeper by robot arms,” 2011 37th Annual Conf. on IEEE Industrial Electronics Society (IECON), pp. 265-270, 2011.
- [22] Y. Noguchi, M. Iwase, S. Hatakeyama, and M. Izutsu, “A yoyo trick realized by parallel-link manipulator,” 2013 39th Annual Conf. of the IEEE Industrial Electronics Society (IECON), pp. 4049-4054, 2013.
- [23] T. Yoshioka, T. Sakuma, T. Nemoto, and M. Iwase, “Realization of robotic yoyo operation based on analysis of human motion,” 2012 9th France-Japan 7th Europe-Asia Congress on Mechatronics (MECATRONICS) and 2012 13th Int. Workshop on Research and Education in Mechatronics (REM), pp. 299-306, Nov. 2012.
- [24] K. Arczewski and W. Blajer, “A unified approach to the modelling of holonomic and nonholonomic mechanical systems,” Mathematical Modelling of Systems, Vol.2, No.3, pp. 157-174, 1996.
- [25] W. Blajer, “A geometrical interpretation and uniform matrix formulation of multibody system dynamics,” ZAMM-J. of Applied Mathematics and Mechanics/Zeitschrift für Angewandte Mathematik und Mechanik, Vol.81, No.4, pp. 247-259, 2001.
- [26] H. Ohsaki, M. Iwase, and S. Hatakeyama, “A Consideration of nonlinear system modeling using the projection method,” SICE 2007 Annual Conf., pp. 1915-1920, 2007.
- [27] T. Sakuma, T. Nemoto, M. Iwase, S. Hatakeyama, and M. Izutsu, “Control system design for robot arms playing inside-loop yoyo trick,” 2012 38th Annual Conf. on IEEE Industrial Electronics Society (IECON), pp. 2204-2209, 2012.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.