Development Report:
Lane-Marker-Based Map Construction and Map Precision Evaluation Methods Using On-Board Cameras for Autonomous Driving
Kenta Maeda*, Junya Takahashi*, and Pongsathorn Raksincharoensak**
*Research & Development Group, Hitachi, Ltd.
832-2 Horiguchi, Hitachinaka, Ibaraki 312-0034, Japan
**Smart Mobility Research Center, Tokyo University of Agriculture and Technology
2-24-16 Naka-cho, Koganei, Tokyo 184-8588, Japan

This report describes a map construction and evaluation method based on lane-marker information for autonomous driving. Autonomous driving systems typically require digital high-definition (HD) maps to correct the current position of autonomous vehicles by using localization techniques. However, an HD map is usually costly to generate because it requires a special-purpose vehicle and mapping system with precise and expensive sensors. This report presents a map construction method that uses cost-efficient on-board cameras. We implement two types of map construction methods with two different cameras in terms of range and field of view and test their performances to determine the minimum sensor specification required for autonomous driving. This report also presents a constructed map evaluation method to determine the “usability” of the map for autonomous driving. Given that the system cannot obtain “true” positions of landmarks, the method judges whether the constructed map contains sufficient information for localization via the presented indices “lateral-distance error.” The methods are verified based on mapping and localization errors determined via manual driving tests. Furthermore, the smoothness of steering maneuvers is determined by conducting autonomous driving tests on a proving ground. The results reveal the necessary conditions of sensor requirements, i.e., the constant visibility of landmarks is one of the key factors for ego-localization to conduct autonomous driving.
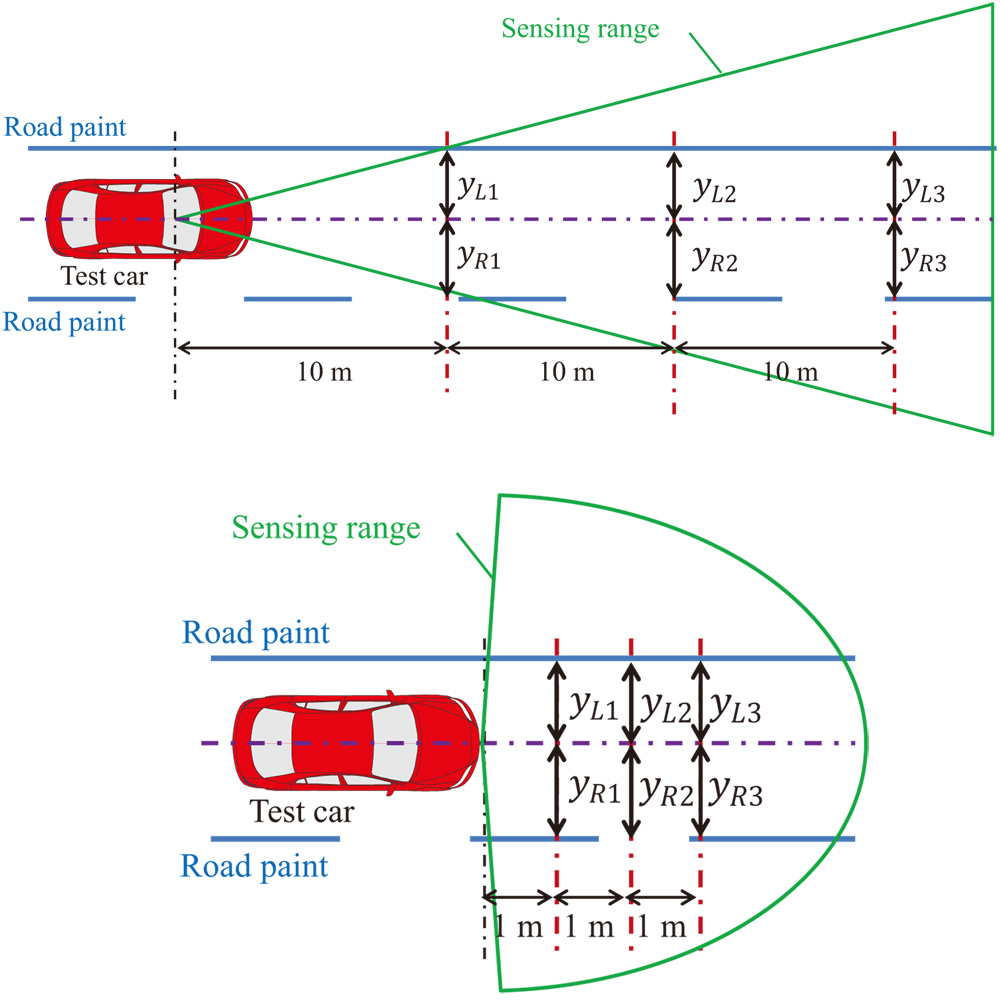
Two cameras with different range and FOV
- [1] I. Shim, J. Choi, S. Shin, T.-H. Oh, U. Lee, B. Ahn, D.-G. Choi, D. H. Shim, and I.-S. Kweon, “An Autonomous Driving System for Unknown Environments Using a Unified Map,” IEEE Trans. on Intelligent Transportation Systems, Vol.16, No.4, pp. 1999-2013, 2015.
- [2] K. Bengler, K. Dietmayer, B. Farber, M. Maurer, C. Stiller, and H. Winner, “Three Decades of Driver Assistance Systems: Review and Future Perspectives,” IEEE Intelligent Transportation Systems Magazine, Vol.6, No.4, pp. 6-22, 2014.
- [3] M. Montemerlo, J. Becker, S. Bhat, H. Dahlkamp et al., “Junior: The Stanford Entry in the Urban Challenge,” J. of Field Robotics, Vol.25, No.9, pp. 569-597, 2008.
- [4] C. Urmson, J. Anhalt, D. Bagnell et. al., “Autonomous Driving in Urban Environments,” J. of Field Robotics, Vol.25, No.8, pp. 425-466, 2008.
- [5] I. Miller, M. Campbell, and D. Huttenlocher, “Map-aided localization in sparse global positioning system environments using vision and particle filtering,” J. of Field Robotics, Vol.28, No.5, pp. 619-643, 2011.
- [6] W. Huang, K. Wang, Y. Lv, and F. Zhu, “Autonomous vehicles testing methods review,” IEEE 19th Int. Conf. on Intelligent Transportation Systems, 2016.
- [7] N. Suganuma and T. Uozumi, “Precise position estimation of autonomous vehicle based on map-matching,” Proc. 2011 IEEE Intelligent Vehicles Symp. (IV), pp. 296-301, 2011.
- [8] N. Nagasaka and M. Harada, “Towards safe, smooth, and stable path planning for on-road autonomous driving under uncertainty,” Proc. 2016 IEEE 19th Int. Conf. on Intelligent Transportation Systems, pp. 795-801, 2016.
- [9] P. J. Besl and N. D. McKay, “A method for registration of 3-D shapes,” IEEE Trans. on Pattern Analysis and Machine Intelligence, Vol.14, No.2, pp. 239-256, 2002.
- [10] H. Fu, L. Ye, R. Yu, and T. Wu, “An efficient scan-to-map matching approach for autonomous driving,” Proc. 2016 IEEE Int. Conf. on Mechatronics and Automation, pp. 1649-1654, 2016.
- [11] N. Suganuma and D. Yamamoto, “Map based localization of autonomous vehicle and its public urban road driving evaluation,” Proc. 2015 IEEE/SICE Int. Symp. on System Integration, pp. 467-471, 2015.
- [12] G. Trehard, E. Pollard, B. Bradai, and F. Nashashibi, “On line mapping and global positioning for autonomous driving in urban environment based on evidential SLAM,” Proc. 2015 IEEE Intelligent Vehicles Symp., pp. 814-819, 2015.
- [13] J. Rohde, B. Völz, H. Mielenz, and J. M. Zöllner, “Precise vehicle localization in dense urban environments,” Proc. 2016 IEEE 19th Int. Conf. on Intelligent Transportation Systems, pp. 853-858, 2016.
- [14] R. Matthaei, G. Bagschik, and M. Maurer, “Map-relative localization in lane-level maps for ADAS and autonomous driving,” Proc. 2014 IEEE Intelligent Vehicles Symp., pp. 49-55, 2014.
- [15] D. Kim, T. Chung, and K. Yi, “Lane map building and localization for automated driving using 2D laser rangefinder,” Proc. 2015 IEEE Intelligent Vehicles Symp. (IV), pp. 680-685, 2015.
- [16] H. Deusch, D. Nuss, P. Konrad, M. Konrad, M. Fritzsche, and K. Dietmayer, “Improving localization in digital maps with grid maps,” Proc. 16th Int. IEEE Conf. on Intelligent Transportation Systems, pp. 1522-1527, 2013.
- [17] G.-P. Gwon, W.-S. Hur, S.-W. Kim, and S.-W. Seo, “Generation of a Precise and Efficient Lane-Level Road Map for Intelligent Vehicle Systems,” IEEE Trans. on Vehicular Technology, Vol.66, No.6, pp. 4517-4533, 2017.
- [18] R. W. Wolcott and R. M. Eustice, “Visual localization within LIDAR maps for automated urban driving,” Proc. 2014 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 176-183, 2014.
- [19] D. Gruyer, R. Belaroussi, and M. Revilloud, “Map-aided localization with lateral perception,” Proc. 2014 IEEE Intelligent Vehicles Symp., pp. 674-680, 2014.
- [20] M. Schreiber, A.-M. Hellmund, and C. Stiller, “Multi-drive feature association for automated map generation using low-cost sensor data,” Proc. 2015 IEEE Intelligent Vehicles Symp. (IV), pp. 1140-1147, 2015.
- [21] D. Kim, B. Kim, T. Chung, and K. Yi, “Lane-Level Localization Using an AVM Camera for an Automated Driving Vehicle in Urban Environments,” IEEE/ASME Trans. on Mechatronics, Vol.22, No.1, pp. 280-290, 2017.
- [22] A. Sujiwo, T. Ando, E. Takeuchi, Y. Ninomiya, and M. Edahiro, “Monocular Vision-Based Localization Using ORB-SLAM with LIDAR-Aided Mapping in Real-World Robot Challenge,” J. Robot. Mechatron., Vol.28, No.4, pp. 479-490, 2016.
- [23] H. Saito, K. Kobayashi, K. Watanabe, and T. Kinoshita, “New Lane Detection Algorithm that Emulates Human Color Recognition,” J. Robot. Mechatron., Vol.27, No.4, pp. 382-391, 2015.
- [24] A. Ohashi, Y. Tanaka, G. Masuyama, K. Umeda, D. Fukuda, T. Ogata, T. Narita, S. Kaneko, Y. Uchida, and K. Irie, “Fisheye stereo camera using equirectangular images,” Proc. 17th Int. Conf. on Research and Education in Mechatronics, pp. 284-289, 2016.
- [25] M. Yokozuka, N. Hashimoto, and O. Matsumoto, “Low-cost 3D mobile mapping system by 6 DOF localization using smartphone embedded sensors,” Proc. 2015 IEEE Int. Conf. on Vehicular Electronics and Safety, pp. 182-189, 2015.
- [26] M. Kudo, S. Kakegawa, T. Shima, A. Kuriyama, Y. Uchida, and S. Hayase, “Advances in Vehicle Periphery Sensing Techniques Aimed at Realizing Autonomous Driving,” Hitachi Review, Vol.67, No.1, pp. 52-57, 2018.
- [27] M. Takemura, M. Imai, M. Kiyohara, K. Irie, M. Sakata, and S. Muramatsu, “Development of Lens Condition Diagnosis for Lane Departure Warning by Using Outside Camera,” Proc. SAE 2014 World Congress & Exhibition, 10.4271, 2014.
- [28] K. Hara and H. Saito, “Vehicle Localization Based on the Detection of Line Segments from Multi-Camera Images,” J. Robot. Mechatron., Vol.27, No.6, pp. 617-626, 2015.
- [29] S. Jung, J. Youn, and S. Sull, “Efficient Lane Detection Based on Spatiotemporal Images,” IEEE Trans. on Intelligent Transportation Systems, Vol.17, No.1, pp. 289-295, 2016.
- [30] D. C. Andrade, F. Bueno, F. R. Franco, R. A. Silva, J. H. Z. Neme, E. Margraf, W. T. Omoto, F. A. Farinelli, A. M. Tusset, S. Okida, M. M. D. Santos, and A. Ventura, “A Novel Strategy for Road Lane Detection and Tracking Based on a Vehicle’s Forward Monocular Camera,” IEEE Trans. on Intelligent Transportation Systems, Vol.20, No.4, pp. 1497-1507, 2019.
- [31] C. Yuan, H. Chen, J. Liu, D. Zhu, and Y. Xu, “Robust Lane Detection for Complicated Road Environment Based on Normal Map,” IEEE Access, Vol.6, pp. 49679-49689, 2018.
- [32] F. Chenavier and J. L. Crowley, “Position estimation for a mobile robot using vision and odometry,” Proc. 1992 IEEE Int. Conf. on Robotics and Automation, pp. 2588-2593, 1992.
- [33] S. Nobili, G. Tinchev, and M. Fallon, “Predicting Alignment Risk to Prevent Localization Failure,” Proc. 2018 IEEE Int. Conf. on Robotics and Automation, pp. 1003-1010, 2018.
- [34] W. Zhen, S. Zeng, and S. Soberer, “Robust localization and localizability estimation with a rotating laser scanner,” Proc. 2017 IEEE Int. Conf. on Robotics and Automation, pp. 6240-6245, 2017.
- [35] K. Maeda, H. Fujimoto, and Y. Hori, “Fundamental study on design method of Yaw-Moment Observer for improvement of drivers’ comfort for electric vehicle,” Proc. 37th Annual Conf. of the IEEE Industrial Electronics Society, pp. 3846-3851, 2011.
- [36] K. Maeda, J. Takahashi, T. Kojima, and P. Raksincharoensak, “Investigation on Precision Evaluation Method of Self-Constructing Map for Autonomous Driving,” Trans. of Society of Automotive Engineers of Japan, Vol.49, No.5, pp. 1074-1079, 2018 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.