Paper:
Safety Compensation for Improving Driver Takeover Performance in Conditionally Automated Driving
Hua Yao*, Suyang An*, Huiping Zhou**, and Makoto Itoh**
*Department of Risk Engineering, Graduate School of Systems and Information Engineering, University of Tsukuba
1-1-1 Tennodai, Tsukuba 305-8573, Japan
**Faculty of Engineering, Information and Systems, University of Tsukuba
1-1-1 Tennodai, Tsukuba 305-8573, Japan

The topic of transition from automated driving to manual maneuver in conditionally automated driving (SAE level-3) has acquired increasing interest. In such conditionally automated driving, drivers are expected to take over the vehicle control if the situation goes beyond the system’s functional limit of operation. However, it is challenging for drivers to resume control timely and perform well after being engaged in non-driving related tasks. Facing this challenge, this paper investigated a safety compensation in which the system conducts automatic deceleration to prolong the time budget for drivers to response. The purpose of the paper is to evaluate the effect of safety compensation on takeover performance in different takeover scenarios such as fog, route choosing, and lane closing. In the experiment, 16 participants were recruited. Results showed no significant effect of safety compensation on the takeover time, but a significant effect on the longitudinal driving performance (viz. driver brake input and the time to event). Moreover, it indicated a significant effect of safety compensation on the lateral acceleration in the lane closing scenario. This finding is useful for the automotive manufacturers to supply users a safer transition scheme from automated driving to manual maneuver.
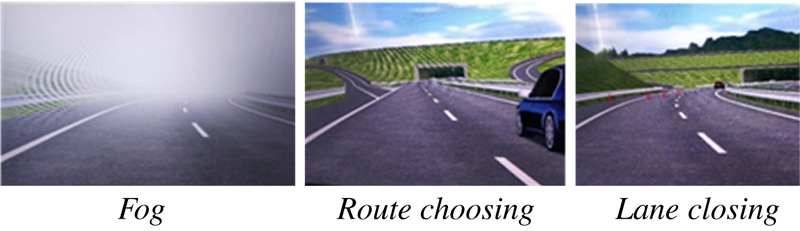
Takeover scenarios
- [1] S. Tsugawa, “Special Issue on Fundamental Technologies for ITS,” J. Robot. Mechatron., Vol.13, No.4, p. 339, 2001.
- [2] SAE international, “Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles,” J3016-201806, 2018.
- [3] C. Coles, “Automated Vehicles: A Guide for Planners and Policymakers,” Master Dissertation of California Polytechnic State University, pp. 1-93, 2016.
- [4] T. Bellet, M. Cunneen, M. Mullins et al., “From semi to fully autonomous vehicles: New emerging risks and ethico-legal challenges for human-machine interactions,” Transportation research part F: traffic psychology and behaviour, Vol.63, pp. 153-164, 2019.
- [5] Y. Forster, F. Naujoks, A. Neukum et al., “Driver compliance to take-over requests with different auditory outputs in conditional automation,” Accident Analysis & Prevention, Vol.109, pp. 18-28, 2017.
- [6] S. Hergeth, L. Lorenz, and J. F. Krems, “Prior familiarization with takeover requests affects drivers’ takeover performance and automation trust,” Human Factors: The J. of the Human Factors and Ergonomics Society, Vol.59, No.3, pp. 457-470, 2017.
- [7] M. Körber, C. Gold, D. Lechner, and K. Bengler, “The influence of age on the take-over of vehicle control in highly automated driving,” Transportation research part F: traffic psychology and behaviour, Vol.39, pp. 19-32, 2016.
- [8] B. Wandtner, N. Schömig, and G. Schmidt, “Effects of non-driving related task modalities on takeover performance in highly automated driving,” Human Factors: The J. of the Human Factors and Ergonomics Society, Vol.60, No.6, pp. 870-881, 2018.
- [9] K. Zeeb, A. Buchner, and M. Schrauf, “What determines the take-over time? An integrated model approach of driver take-over after automated driving,” Accident Analysis & Prevention, Vol.78, pp. 212-221, 2015.
- [10] J. Nilsson, P. Falcone, and J. Vinter, “Safe transitions from automated to manual driving using driver controllability estimation,” IEEE Trans. on Intelligent Transportation Systems, Vol.16, No.4, pp. 1806-1816, 2014.
- [11] C. Gold, D. Damböck, L. Lorenz et al., “‘Take over!’ How long does it take to get the driver back into the loop?,” Proc. of the Human Factors and Ergonomics Society 57th Annual Meeting, Vol.57, No.1, pp. 1938-1942, Los Angeles, USA, 2013.
- [12] C. Braunagel, W. Rosenstiel, and E. Kasneci, “Ready for take-over? A new driver assistance system for an automated classification of driver take-over readiness,” IEEE Intelligent Transportation Systems Magazine, Vol.9, No.4, pp. 10-22, 2017.
- [13] T. Inagaki and T. B. Sheridan, “A critique of the SAE conditional driving automation definition, and analyses of options for improvement,” Cognition, Technology & Work, Vol.21, No.4, pp. 569-578, 2019.
- [14] S. Li, P. Blythe, W. Guo, and A. Namdeo, “Investigation of older driver’s takeover performance in highly automated vehicles in adverse weather conditions,” IET Intelligent Transport Systems, Vol.12, No.9, pp. 1157-1165, 2018.
- [15] A. Eriksson and N. A. Stanton, “Takeover time in highly automated vehicles: noncritical transitions to and from manual control,” Human Factors: The J. of the Human Factors and Ergonomics Society, Vol.59, No.4, pp. 689-705, 2017.
- [16] S. Lapoehn, A. Schieben, T. Hesse et al., “Concept of controlling the usage of nomadic devices in highly-automated vehicles,” IET Intelligent Transport Systems, Vol.9, No.6, pp. 599-605, 2015.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.