Paper:
Personalized Subjective Driving Risk: Analysis and Prediction
Naren Bao*1, Alexander Carballo*2,*3, Chiyomi Miyajima*4, Eijiro Takeuchi*1,*3, and Kazuya Takeda*1,*2,*3
*1Graduate School of Informatics, Nagoya University
Furo-cho, Chikusa-ku, Nagoya 464-8601, Japan
*2Institutes of Innovation for Future Society, Nagoya University
Furo-cho, Chikusa-ku, Nagoya 464-8601, Japan
*3TierIV Inc., Open Innovation Center, Nagoya University
1-1-3 Meieki-cho, Nakamura-ku, Nagoya 450-6610, Japan
*4Department of Information Systems, School of Informatics, Daido University
10-3 Takiharu-cho, Minami-ku, Nagoya 457-8530, Japan

Subjective risk assessment is an important technology for enhancing driving safety, because an individual adjusts his/her driving behavior according to his/her own subjective perception of risk. This study presents a novel framework for modeling personalized subjective driving risk during expressway lane changes. The objectives of this study are twofold: (i) to use ego vehicle driving signals and surrounding vehicle locations in a data-driven and explainable approach to identify the possible influential factors of subjective risk while driving and (ii) to predict the specific individual’s subjective risk level just before a lane change. We propose the personalized subjective driving risk model, a combined framework that uses a random forest-based method optimized by genetic algorithms to analyze the influential risk factors, and uses a bidirectional long short term memory to predict subjective risk. The results demonstrate that our framework can extract individual differences of subjective risk factors, and that the identification of individualized risk factors leads to better modeling of personalized subjective driving risk.
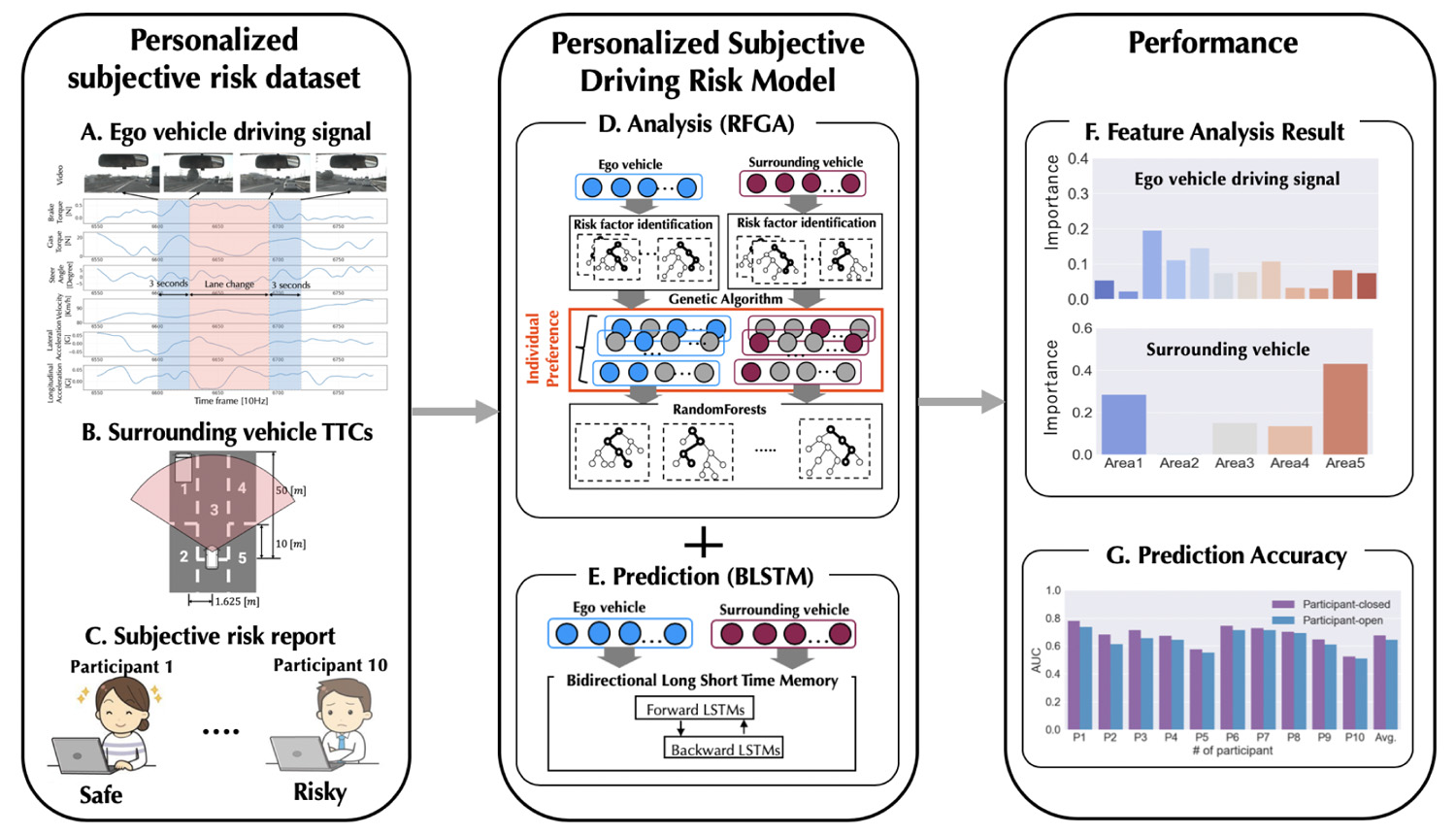
Personalized subjective driving risk model (PSDRM) proposed in this study, including our subjective risk dataset, and RFGA-BLTSM framework
- [1] Y. Zhang, E. K. Antonsson, and K. Grote, “A new threat assessment measure for collision avoidance systems,” Proc. of 2006 IEEE Intelligent Transportation Systems Conf., pp. 968-975, 2006.
- [2] C. Laugier, I. E. Paromtchik, M. Perrollaz, M. Yong, J.-D. Yoder, C. Tay, K. Mekhnacha, and A. Nègre, “Probabilistic analysis of dynamic scenes and collision risks assessment to improve driving safety,” IEEE Intelligent Transportation Systems Magazine, Vol.3, No.4, pp. 4-19, 2011.
- [3] Y. Zheng, J. Wang, X. Li, C. Yu, K. Kodaka, and K. Li, “Driving risk assessment using cluster analysis based on naturalistic driving data,” Proc. of 17th Int. IEEE Conf. on Intelligent Transportation Systems (ITSC), pp. 2584-2589, 2014.
- [4] S. Lefèvre, D. Vasquez, and C. Laugier, “A survey on motion prediction and risk assessment for intelligent vehicles,” Robomech J., Vol.1, 1, 2014.
- [5] X. Wang, M. Chen, M. Zhu, and P. Tremont, “Development of a kinematic-based forward collision warning algorithm using an advanced driving simulator,” IEEE Trans. on Intelligent Transportation Systems, Vol.17, No.9, pp. 2583-2591, 2016.
- [6] U. Tränkle, C. Gelau, and T. Metker, “Risk perception and age-specific accidents of young drivers,” Accident Analysis and Prevention, Vol.22, No.2, pp. 119-125, 1990.
- [7] G. B. Grayson, G. Maycock, J. A. Groeger, S. M. Hammond, and D. T. Field, “Risk, hazard perception and perceived control,” TRL Report TRL560, TRL Ltd., Crowthorne, UK, 2003.
- [8] M. Horswill and F. Mckenna, “Drivers’ hazard perception ability: Situation awareness on the road,” S. Banbury and S. Tremblay (Eds.), “A cognitive approach to situation awareness: Theory and application,” pp. 155-175, Routledge, 2004.
- [9] D. Fisher and D. Strayer, “Modeling situation awareness and crash risk,” Annals of Advances in Automotive Medicine / Annual Scientific Conf., Association for the Advancement of Automotive Medicine. Association for the Advancement of Automotive Medicine. Scientific Conf., Vol.58, pp. 33-39, 2014.
- [10] P. Ping, Y. Sheng, W. Qin, C. Miyajima, and K. Takeda, “Modeling driver risk perception on city roads using deep learning,” IEEE Access, Vol.6, pp. 68850-68866, 2018.
- [11] M. Edmonds, F. Gao, H. Liu, X. Xie, S. Qi, B. Rothrock, Y. Zhu, Y. N. Wu, H. Lu, and S.-C. Zhu, “A tale of two explanations: Enhancing human trust by explaining robot behavior,” Science Robotics, Vol.4, No.37, eaay4663, 2019.
- [12] T. Kondoh, T. Hirose, and N. Fuyuyama, “A proposal of tailor-made risk feeling formula when closing on the lead vehicle,” The Japanese J. of Ergonomics, Vol.50, pp. 350-358, 2014.
- [13] S. McGill, G. Rosman, T. Ort, A. Pierson, I. Gilitschenski, B. Araki, L. Fletcher, S. Karaman, D. Rus, and J. Leonard, “Probabilistic risk metrics for navigating occluded intersections,” IEEE Robotics and Automation Letters, p. 1, 2019.
- [14] D. Sato, E. Nunobiki, S. Inoue, and P. Raksincharoensak, “Motion planning and control in highway merging maneuver based on dynamic risk potential optimization,” Proc. of 5th Int. Symp. on Future Active Safety Technology Towards Zero-Traffic-Accidents (FAST-zero’19), pp. 1-6, 2019.
- [15] S. Kitajima, Y. Marumo, T. Hiraoka, and M. Itoh, “Comparison of evaluation indices concerning estimation of driver’s risk perception,” Review of Automotive Engineering, Vol.30, No.2, pp. 191-198, 2009.
- [16] B. Wu, X. Zhu, J. Shen, and L. Li, “A study on risk assessment algorithm based on natural driving data,” Automotive Engineering, Vol.39, No.8, pp. 907-914, 2017.
- [17] H. Mao, X. Deng, D. Lord, G. Flintsch, and F. Guo, “Adjusting finite sample bias in traffic safety modeling,” Accident Analysis and Prevention, Vol.131, pp. 112-121, 2019.
- [18] Y. Fujinami, P. Raksincharoensak, D. Ulbricht, and R. Adomat, “Risk predictive driver assistance system for collision avoidance in intersection right turns,” J. Robot. Mechatron., Vol.30, No.1, pp. 15-23, 2018.
- [19] R. Fuller, “Towards a general theory of driver behaviour,” Accident Analysis and Prevention, Vol.37, No.3, pp. 461-472, 2005.
- [20] G. J. S. Wilde, “Target Risk 2: A New Psychology of Safety and Health – What Works? What Doesn’t? And Why...,” Pde Pubns, 2001.
- [21] S. G. Charlton, N. J. Starkey, J. A. Perrone, and R. B. Isler, “What’s the risk? A comparison of actual and perceived driving risk,” Transportation Research Part F: Traffic Psychology and Behaviour, Vol.25, pp. 50-64, 2014.
- [22] H. Huang, Y. Li, X. Zheng, J. Wang, Q. Xu, and S. Zheng, “Objective and subjective analysis to quantify influence factors of driving risk,” Proc. of 2019 IEEE Intelligent Transportation Systems Conf. (ITSC), pp. 4310-4316, 2019.
- [23] P. Ulleberg and T. Rundmo, “Personality, attitudes and risk perception as predictors of risky driving behaviour among young drivers,” Safety Science, Vol.41, No.5, pp. 427-443, 2003.
- [24] F. W. Siebert, M. Oehl, and H.-R. Pfister, “The influence of time headway on subjective driver states in adaptive cruise control,” Transportation Research Part F: Traffic Psychology and Behaviour, Vol.25, pp. 65-73, 2014.
- [25] F. W. Siebert, M. Oehl, F. Bersch, and H.-R. Pfister, “The exact determination of subjective risk and comfort thresholds in car following,” Transportation Research Part F: Traffic Psychology and Behaviour, Vol.46, Part A, pp. 1-13, 2017.
- [26] H. Aoki, N. V. Q. Hung, and H. Yasuda, “Perceptual risk estimate (pre): an index of the longitudinal risk estimate,” Proc. of 22nd Enhanced Safety of Vehicles Conf., 11-0121, 2011.
- [27] T. Rundmo, “Associations between risk perception and safety,” Safety Science, Vol.24, No.3, pp 197-209, 1996.
- [28] X. Cai, C. Wang, S. Chen, and J. Lu, “Model development for risk assessment of driving on freeway under rainy weather conditions,” PLOS ONE, Vol.11, e0149442, 2016.
- [29] Y. Wang, L. Li, L. Feng, and H. Peng, “Professional Drivers’ Views on Risky Driving Behaviors and Accident Liability: A Questionnaire Survey in Xining, China,” Transportation Letters, Vol.6, No.3, pp. 126-135, 2014.
- [30] S. Jafarpour and V. Rahimi-Movaghar, “Determinants of risky driving behavior: a narrative review,” Medical J. of the Islamic Republic of Iran, Vol.28, p. 142, 2014.
- [31] T. A. Dingus, F. Guo, S. Lee, J. F. Antin, M. Perez, M. Buchanan-King, and J. Hankey, “Driver crash risk factors and prevalence evaluation using naturalistic driving data,” Proc. of the National Academy of Sciences, Vol.113, No.10, pp. 2636-2641, 2016.
- [32] F. Guo and Y. Fang, “Individual driver risk assessment using naturalistic driving data,” Accident Analysis and Prevention, Vol.61, pp. 3-9, 2013.
- [33] N. Bao, C. Miyajima, E. Takeuchi, and K. Takeda, “Estimating risk levels perceived by individuals for lane change scenes,” Proc. of the 4th Int. Symp. on Future Active Safety Technology Toward Zero Accidents (FAST-zero), pp. 1-6, 2017.
- [34] L. Breiman, “Random forests,” Machine Learning, Vol.45, No.1, pp. 5-32, 2001.
- [35] B. Kim, D. M. Malioutov, and K. R. Varshney, “Proceedings of the 2016 ICML workshop on human interpretability in machine learning (WHI 2016),” arXiv:1607.02531, 2016.
- [36] D. Gunning, “Darpa’s explainable artificial intelligence (xai) program,” IUI ’19: Proc. of the 24th Int. Conf. on Intelligent User Interfaces, p. ii, 2019.
- [37] G. Louppe, “Understanding random forests: From theory to practice,” arXiv:1407.7502, 2014.
- [38] R. Genuer, J.-M. Poggi, and C. Tuleau-Malot, “Variable selection using random forests,” Pattern Recognition Letters, Vol.31, No.14, pp. 2225-2236, 2010.
- [39] K. Takeda, J. H. L. Hansen, P. Boyraz, L. Malta, C. Miyajima, and H. Abut, “International large-scale vehicle corpora for research on driver behavior on the road,” IEEE Trans. on Intelligent Transportation Systems, Vol.12, No.4, pp. 1609-1623, 2011.
- [40] E. Allen and C. A. Seaman, “Likert scales and data analyses,” Quality Progress, pp. 64-65, 2007.
- [41] C. Miyajima, Y. Nishiwaki, K. Ozawa, T. Wakita, K. Itou, K. Takeda, and F. Itakura, “Driver modeling based on driving behavior and its evaluation in driver identification,” Proc. of the IEEE, Vol.95, No.2, pp. 427-437, 2007.
- [42] L. J. P. van der Maaten and G. E. Hinton, “Visualizing high-dimensional data using t-sne,” J. of Machine Learning Research, Vol.9, pp. 2579-2605, 2008.
- [43] P. G. Gipps, “A model for the structure of lane-changing decisions,” Transportation Research Part B: Methodological, Vol.20, No.5, pp. 403-414, 1986.
- [44] A. T. Azar, H. I. Elshazly, A. E. Hassanien, and A. M. Elkorany, “A random forest classifier for lymph diseases,” Computer Methods and Programs in Biomedicine, Vol.113, No.2, pp. 465-473, 2014.
- [45] E. Elyan and M. M. Gaber, “A genetic algorithm approach to optimising random forests applied to class engineered data,” Information Sciences, Vol.384, pp. 220-234, 2017.
- [46] M. Schuster and K. Paliwal, “Bidirectional recurrent neural networks,” IEEE Trans. on Signal Processing, Vol.45, pp. 2673-2681, 1997.
- [47] F. Weninger, J. Bergmann, and B. Schuller, “Introducing CURRENNT: The Munich Open-Source CUDA RecurREnt Neural Network Toolkit,” The J. of Machine Learning Research, Vol.16, No.1, pp. 547-551, 2015.
- [48] F. A. Gers, J. Schmidhuber, and F. Cummins, “Learning to forget: Continual prediction with lstm,” IET, 1999.
- [49] F. Zhang, C. Hu, Q. Yin, W. Li, H. Li, and W. Hong, “Multi-Aspect-Aware Bidirectional LSTM Networks for Synthetic Aperture Radar Target Recognition,” IEEE Access, Vol.5, pp. 26880-26891, doi: 10.1109/ACCESS.2017.2773363, 2017.
- [50] S. Lefévre, A. Carvalho, and F. Borrelli, “A learning-based framework for velocity control in autonomous driving,” IEEE Trans. on Automation Science and Engineering, Vol.13, No.1, pp. 32-42, 2016.
- [51] C. Vallon, Z. Ercan, A. Carvalho, and F. Borrelli, “A machine learning approach for personalized autonomous lane change initiation and control,” 2017 IEEE Intelligent Vehicles Symp. (IV), pp. 1590-1595, 2017.
- [52] S. Ramyar, A. Homaifar, S. Salaken, S. Nahavandi, and A. Kurt, “A personalized highway driving assistance system,” 2017 IEEE Intelligent Vehicles Symp. (IV), pp. 1596-1601, 2017.
- [53] N. Bao, D. Yang, A. Carballo, Ü. Özgüner, and K. Takeda, “Personalized safety-focused control by minimizing subjective risk,” Proc. of 2019 IEEE Intelligent Transportation Systems Conf. (ITSC), pp. 3853-3858, 2019.
- [54] C. E. Rasmussen, “Gaussian processes in machine learning,” O. Bousquet, U. von Luxburg, G. Rätsch (Eds), “Advanced Lectures on Machine Learning,” pp. 63-71, Springer, 2004.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.