Paper:
Mobile Robot Utilizing Arm Rotations – Performance of Mobile Robot Under a Gravity Environment –
Ryota Hayashi*, Yasuyuki Setoyama**, Tetsuya Kinugasa*, and Koji Yoshida*
*Department of Mechanical Systems Engineering, Okayama University of Science
1-1 Ridai-cho, Kita-ku, Okayama 700-0005, Japan
**Department of Electronic Control Engineering, National Institute of Technology, Kagoshima College
1460-1 Shinko, Hayato-cho, Kirishima 899-5193, Japan

In this research, we have considered a mobile robot that can start to move by utilizing rotations of the two arms. This robot consists of two rotating arms and a body. Additionally, it has a device that can fix the body to a platform constructed on a certain wall or floor. In our previous study, we investigated the performance of a robot that could move in a planar space without friction or gravity through several numerical simulations. In this study, we investigate the performance of the mobile robot under a gravity environment. While the body is fixed to a starting platform, the mobile robot can store kinetic energy by rotating its arms. When the body is released from the starting platform, the mobile robot hops to the subsequent platform. We consider a scheme to control the hopping direction of the mobile robot and a scheme to reduce the collision impact against the subsequent platform. Thereafter, we verify the feasibility of the proposed schemes through numerical simulations.
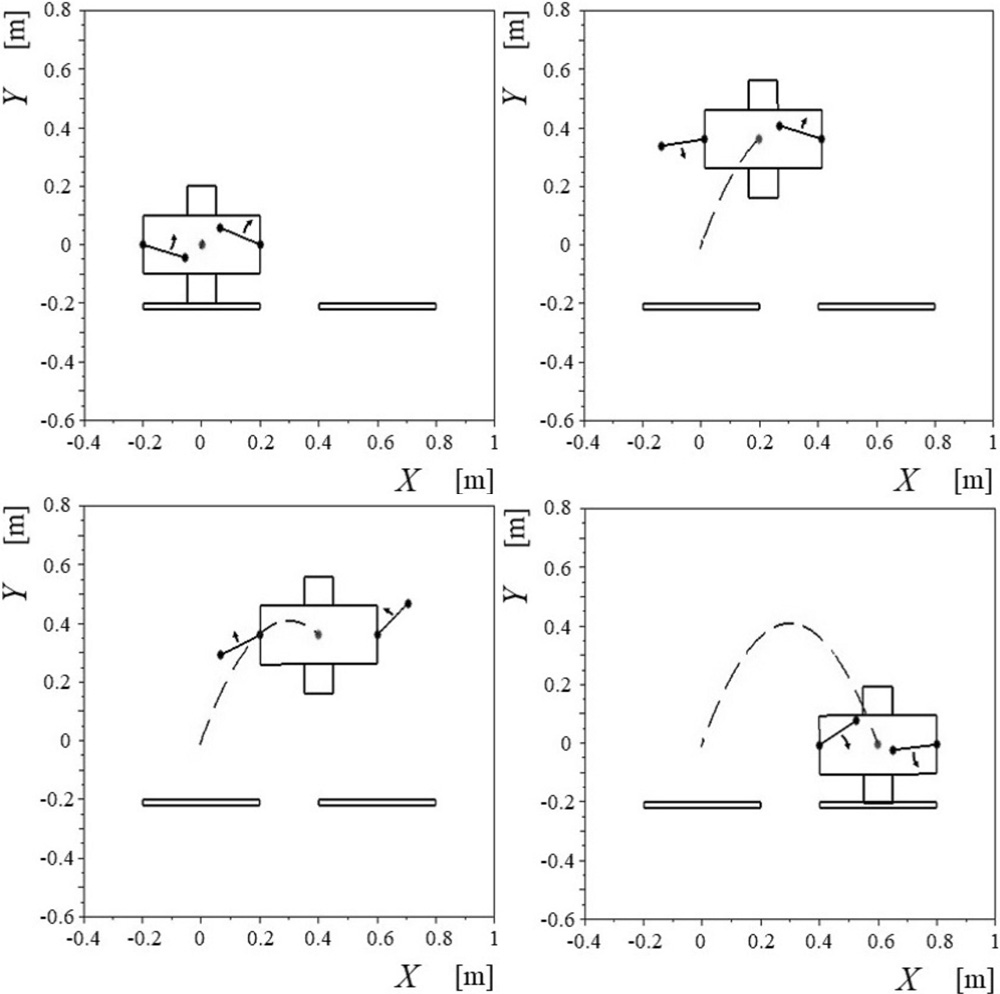
Hopping of the robot using arm rotations
- [1] M. Ishikawa, R. Kitayoshi, and T. Sugie, “Volvot: A spherical mobile robot with eccentric twin rotors,” Proc. of 2011 IEEE Int. Conf. on Robotics and Biomimetics, pp. 1462-1467, 2011.
- [2] T. Hirano, M. Ishikawa, and K. Osuka, “Cubic mobile robot under rolling constraints,” Proc. of 21st Int. Symp. on Mathematical Theory of Networks and Systems, pp. 618-621, 2014.
- [3] T. Yoshimitsu, T. Kubota, and I. Nakatani, “MINERVA rover which became a small artificial solar satellite,” Proc. of 20th Annual AIAA/USU Conf. on Small Satellites, SSC06-IV-4, 2006.
- [4] K. Nagaoka and K. Yoshida, “Modeling and analysis of ciliary micro-hopping locomotion actuated by an eccentric motor in a microgravity,” Proc. of 2013 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 763-768, 2013.
- [5] M. Kurisu, “Design of a hopping mechanism using permanent magnets for small-scale exploration rovers,” Proc. of 2014 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2355-2360, 2014.
- [6] Y. Hanazawa, T. Hayashi, M. Yamakita, and F. Asano, “High-speed limit cycle walking for biped robots using active up-and-down motion control of wobbling mass,” Proc. of 2013 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 3649-3654, 2013.
- [7] N. Maheshwari, X. Yu, M. Reis, and F. Iida, “Exploiting free vibration of an elastic beam for stable running locomotion,” Proc. of 2012 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics, pp. 27-32, 2012.
- [8] R. Hayashi and S. Tsujio, “High-performance jumping movements by pendulum-type jumping machines,” Proc. of 2001 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, Vol.2, pp. 722-727, 2001.
- [9] R. Hayashi, Y. Okayama, S. Tsujio, and Y. Yu, “Realization of ascending stairs by the pendulum-type jumping machine,” Trans. of the JSME Series C, Vol.74, No.748, pp. 2968-2975, 2008 (in Japanese).
- [10] R. Hayashi, Y. Tanaka, Y. Setoyama, T. Kinugasa, and K. Yoshida, “Mobile robot utilizing rotational movements of the arms – Control of moving direction and reduction of collision impact –,” Proc. of 24th Int. Symp. on Artificial Life and Robotics, pp. 962-967, 2019.
- [11] H. Nakanishi and K. Yoshida, “Impedance control of free-flying space robot for orbital servicing,” J. Robot. Mechatron., Vol.18, No.5, pp. 608-617, 2006.
- [12] K. Miyata, T. Sasagawa, T. Doi, and K. Tadakuma, “A study of leg-type landing gear for aerial vehicles,” J. Robot. Mechatron., Vol.23, No.2, pp. 266-270, 2011.
- [13] Y. Asai, Y. Chiba, K. Sakaguchi, N. Bushida, H. Ohtsuka, Y. Saito, and K. Kikuchi, “Wheel-based stair climbing robot with hopping mechanism – Demonstration of Continuous Stair Climbing Using Vibration –,” J. Robot. Mechatron., Vol.20, No.2, pp. 221-227, 2008.
- [14] T. Mita, “Introduction to nonlinear control theory – skill control of underactuated robots –,” Shokodo, pp. 95-137, 2000 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.