Paper:
Three-DoF Flapping-Wing Robot with Variable-Amplitude Link Mechanism
Terukazu Sato, Akihiro Fujimura, and Naoyuki Takesue
Graduate School of Systems Design, Tokyo Metropolitan University
6-6 Asahigaoka, Hino-shi, Tokyo 191-0065, Japan

This paper describes the development of a three-degrees-of-freedom flapping-wing robot with a variable-amplitude link mechanism for controlling the lift and thrust forces acting on it. The variable-amplitude link mechanism comprises a lever-crank mechanism driven by a brushless DC motor and a linear actuator to control the amplitude of the flapping angle. The robot also comprises two DC motors with reduction gears for feathering and lead-lag motion. In our experiments, the measurement of force-torque revealed the effects of the motion of each wing. We found that the flapping-amplitude difference between the left and right wings causes a roll and yaw moment.
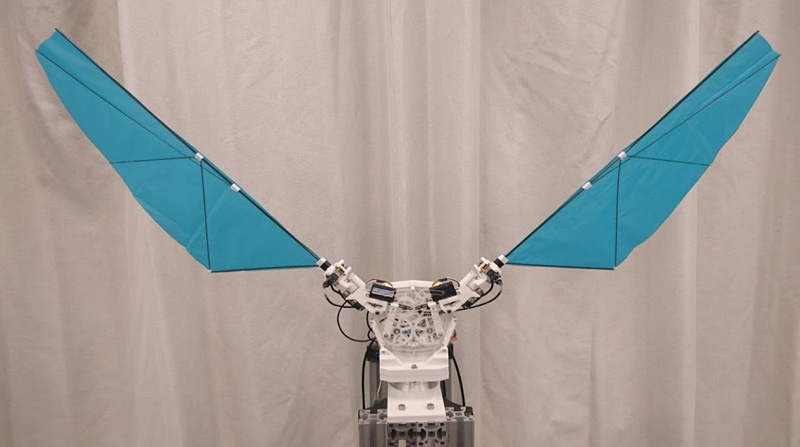
The developed flapping-wing robot
- [1] D. D. Chin and D. Lentink, “Flapping wing aerodynamics: from insects to vertebrates,” J. of Experimental Biology, Vol.219, pp. 920-932, doi: 10.1242/jeb.042317, 2016.
- [2] H. Nagai, K. Isogai, and T. Fujimoto, “Flow Visualization of Aerodynamic Mechanism of Insect Flapping Wings Using PIV,” J. of the Visualization Society of Japan, Vol.30, No.119, pp. 10-15, doi: 10.3154/jvs.30.10, 2010 (in Japanese).
- [3] P.-O. Persson et al., “Numerical Simulation of Flapping Wings Using a Panel Method and a High-Order Navier-Stokes Solver,” Int. J. for Numerical Methods in Engineering, Vol.89, pp. 1296-1316, doi: 10.1002/nme.3288, 2012.
- [4] Y. Kimura, K. Suzuki, and T. Inamuro, “Flight simulation of a two-dimensional flapping wing: flight stability and simple flight control,” RIMS Kokyuroku, Vol.1808, pp. 15-34, 2012 (in Japanese).
- [5] M. Maeda, “Coupling problems in insect- or bird-sized flapping flyers: issues around wing deformation, body deformation, aerodynamic force generation, or flight stability,” RIMS Kokyuroku, Vol.1808, pp. 1-14, 2012 (in Japanese).
- [6] S. Sunada et al., “An Analysis on Feathering Motion Passively Generated by Flapping Motion,” J. of the Japan Society for Aeronautical and Space Sciences, Vol.56, No.648, pp. 41-46, doi: 10.2322/jjsass.56.41, 2008 (in Japanese).
- [7] R. Noda et al., “Development of Bio-Inspired Low-Noise Propeller for a Drone,” J. Robot. Mechatron., Vol.30, No.3, pp. 337-343, doi: 10.20965/jrm.2018.p0337, 2018.
- [8] J. Won et al., “How to Train Your Dragon: Example-Guided Control of Flapping Flight,” ACM Trans. on Graphics, Vol.36, No.4, Article 1, 2017.
- [9] S.-J. Chung et al., “Neurobiologically Inspired Control of Engineered Flapping Flight,” J. of Guidance, Control, and Dynamics, Vol.33, No.2, pp. 440-453, doi: 10.2514/1.45311, 2010.
- [10] B. Cheng and X. Deng, “A Neural Adaptive Controller in Flapping Flight,” J. Robot. Mechatron., Vol.24, No.4, pp. 602-611, 2012.
- [11] H. Liu, S. Ravi, D. Kolomenskiy, and H. Tanaka, “Biomechanics and biomimetics in insect-inspired flight systems,” Philosophical Trans. of the Royal Society B, Vol.371, pp. 1-11, doi: 10.1098/rstb.2015.0390, 2016.
- [12] J. Colorado, C. Rossi, C. Zhang, and A. Barrientos, “Towards efficient flight: Insights on proper morphing-wing modulation in a bat-like robot,” Advanced Robotics, Vol.29, pp. 1-12, doi: 10.1080/01691864.2015.1082501, 2015.
- [13] W. Chi and K. H. Low, “Review and Fin Structure Design for Robotic Manta Ray (RoMan IV),” J. Robot. Mechatron., Vol.24, No.4, pp. 620-628, 2012.
- [14] J. Maglasang et al., “Development of Birdlike Micro Aerial Vehicle with Flapping and Feathering Wing Motions,” Trans. of the Japan Society for Aeronautical and Space Sciences, Vol.51, No.171, pp. 8-15, doi: 10.2322/tjsass.51.8, 2008.
- [15] A. N. Chand, M. Kawanishi, and T. Narikiyo, “Adaptive pole placement pitch angle control of a flapping-wing flying robot,” Advanced Robotics, Vol.30, No.16, pp. 1039-1049, doi: 10.1080/01691864.2016.1196609, 2016.
- [16] M. Keennon et al., “Development of the Nano Hummingbird: A Tailless Flapping Wing Micro Air Vehicle,” 50th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, doi: 10.2514/6.2012-588, 2012.
- [17] G. Ise, D. Yoda, C. Takiguchi, N. Shigematsu et al., “Controlling the aerial posture of a flapping-wing micro air vehicle by shifting its centre of gravity,” 10th Int. Micro Air Vehicle Competition and Conf., pp. 211-215, 2018.
- [18] J. Zhang, C. Dong, and A. Song, “Jumping aided takeoff: Conceptual design of a bio-inspired jumping-flapping multi-modal locomotion robot,” Proc. of 2017 IEEE Int. Conf. on Robotics and Biomimetics (ROBIO), pp. 32-37, doi: 10.1109/ROBIO.2017.8324390, 2017.
- [19] O. A. Hudson, M. Fanni, S. M. Ahmed et al., “Bio-inspired jumping maneuver for launching flapping wing micro air vehicles,” Proc. of 2018 IEEE Int. Conf. on Autonomous Robot Systems and Competitions (ICARSC), pp. 104-109, doi: 10.1109/ICARSC.2018.8374168, 2018.
- [20] H. Ohtake, “Robotics on Bird-like Flapping Flight,” J. of the Robotics Society of Japan, Vol.34, No.1, pp. 14-18, doi: 10.7210/jrsj.34.14, 2016 (in Japanese).
- [21] K. Kakuta, “Theory and how to build of flapping robot,” Radio Control Technique, No.3, pp. 32-43, 2013 (in Japanese).
- [22] K. Kadota, N. Takesue, and H. Mochiyama, “Wing experiment of flapping robot for non-running takeoff,” Proc. of JSME Conf. on Robotics and Mechatronics: Robomec, 1A1-F10, doi: 10.1299/jsmermd.2013._1A1-F10_1, 2013 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.