Paper:
Hierarchical Proximity Sensor for High-Speed and Intelligent Control of Robotic Hand
Yuji Hirai, Takuya Mizukami, Yosuke Suzuki, Tokuo Tsuji, and Tetsuyou Watanabe
Kanazawa University
Kakuma-machi, Kanazawa, Ishikawa 920-1192, Japan

This study proposes a hierarchical proximity information processing system and a novel proximity sensor for realizing high-speed and robust grasp control of a robotic hand. The sensor requires both fast response and advanced situation judgment abilities. Therefore, a function that digitally samples individual reaction amounts of all detection elements is added to the net-structure proximity sensor (NSPS), which extracts the sum and center position of the distribution of reaction amounts of detection elements by high-speed analog computation on the sensor circuit. To integrate these two functions, we construct a circuit design method that enables the coexistence of a multichannel A/D converter circuit on the analog computing circuit of the NSPS without disturbing the current flow for sensing; the proposed sensor is called the “hierarchical proximity sensor.” An analysis of its characteristics indicates that the sensor can be used for feedback control of the fingertip position/posture and to estimate the curvature of objects. Through an experiment conducted using a robotic hand equipped with the proposed sensor, we confirmed that the fingertip can approach an object in 0.18 s based on the high-speed analog computation information, while the information for improving the motion can be obtained by comparing the temporal change in the finger joints with the digital sampling information of the process.
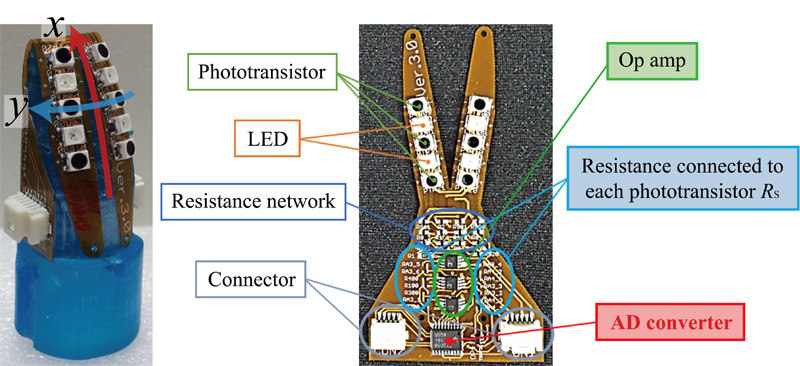
Hierarchical proximity sensor
- [1] A. Collet, D. Berenson, S. S. Srinivasa, and D. Ferguson, “Object recognition and full pose registration from a single image for robotic manipulation,” Proc. of 2009 IEEE Int. Conf. on Robotics and Automation, pp. 48-55, 2009.
- [2] C. Goldfeder, M. Ciocarlie, H. Dang, and P. K. Allen, “The Columbia Grasp Database,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 3343-3349, 2009.
- [3] K. Lai, L. Bo, X. Ren, and D. Fox, “A large-scale hierarchical multi-view RGB-D object dataset,” Proc. of 2011 IEEE Int. Conf. on Robotics and Automation, pp. 1817-1824, 2011.
- [4] W. Czajewski and K. Kolomyjec, “3D Object Detection and Recognition for Robotic Grasping Based on RGB-D Images and Global Features,” Foundations of Computing and Decision Sciences, Vol.42, No.3, pp. 219-237, 2017.
- [5] K. Hsiao, P. Nangeroni, M. Huber, A. Saxena, and A. Y. Ng, “Reactive Grasping Using Optical Proximity Sensors,” Proc. of 2009 IEEE Int. Conf. on Robotics and Automation, pp. 2098-2105, 2009.
- [6] L.-T. Jiang and J. R. Smith, “Seashell Effect Pretouch Sensing for Robotic Grasping,” Proc. of 2012 IEEE Int. Conf. on Robotics and Automation, pp. 2851-2858, 2012.
- [7] H. Amamoto and M. Shimojo, “Mesh Structure Proximity Sensor Capable of being Attached to Free-form Surface with a Few Wires,” Proc. RSJ2006, 1C24, 2006 (in Japanese).
- [8] H. Hasegawa, Y. Suzuki, A. Ming, K. Koyama, M. Ishikawa, and M. Shimojo, “Net-Structure Proximity Sensor: High-Speed and Free-Form Sensor With Analog Computing Circuit,” IEEE/ASME Trans. on Mechatronics, Vol.20, Issue 6, pp. 3232-3241, 2015.
- [9] H. Hasegawa, Y. Mizoguchi, K. Tadakuma, A. Ming, M. Ishikawa, and M. Shimojo, “Development of Intelligent Robot Hand using Proximity, Contact and Slip Sensing,” Proc. IEEE Int. Conf. on Robotics and Automation, pp. 777-784, 2010.
- [10] K. Suzuki, Y. Suzuki, H. Hasegawa, A. Ming, M. Ishikawa, and M. Shimojo, “Pre-shaping of the Fingertip of Robot Hand Covered with Net Structure Proximity Sensor,” Trans. of the Society of Instrument and Control Engineers, Vol.48, No.4, pp. 232-240, 2011 (in Japanese).
- [11] K. Koyama, H. Hasegawa, Y. Suzuki, A. Ming, and M. Shimojo, “Pre-shaping for Various Objects by the Robot Hand Equipped with Resistor Network Structure Proximity Sensors,” Proc. 2013 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 4027-4033, 2013.
- [12] T. Mizukami, Y. Hirai, and Y. Suzuki, “High-Speed Adaptive Grasping of Robot Hand Using Torque Control Based on Proximity Sensor Information – Grasping Posture Determination and Gripping Force Control by Single Feedback Control Law –,” Proc. of SICE-SI2017, pp. 1347-1351, 2017 (in Japanese).
- [13] N. Kouta, Y. Suzuki, A. Ming, M. Ishikawa, and M. Shimojo, “Information Processing Using Distributed Proximity Sensor,” Proc. ROBOMEC2011, 2A2-P05, 2011 (in Japanese).
- [14] A. Namiki, Y. Imai, M. Ishikawa, and M. Kaneko, “Development of a high-speed multifingered hand system and its application to catching,” Proc. 2003 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 2666-2671, 2003.
- [15] S. Teshigawara, T. Tsutsumi, Y. Suzuki, and M. Shimojo, “High Speed and High Sensitivity Slip Sensor for Dexterous Grasping,” J. Robot. Mechatron., Vol.24, No.2, pp. 298-310, 2012.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.