Paper:
Synchronous Position Control of Robotics System for Infrastructure Inspection Moving on Rope Tether
Makpal Sarieva, Lei Yao, Kei Sugawara, and Tadashi Egami
Graduate School of Engineering, Kanagawa University
3-27-1 Rokkakubashi Kanagawa-ku, Yokohama 221-8686, Japan

Most bridges, tunnels, dams, and other infrastructure facilities were constructed in the 1950s to 1960s. At present, aging in these facilities is a social problem. Most of the maintenance check-ups of these infrastructure facilities are manually conducted by close visual inspection, which has limitations. As a result, there have been many proposals on inspection systems for unmanned infrastructure facilities, such as drones and cable robots. However, there are also problems with the use of cable robots and drones, such as restrictions in places that they can be used and effects from the environment. Thus, this study proposes a robotics system for infrastructure inspection that solves such problems. Two robots move on parallel ropes stretching in an H shape, and one robot with a three-dimensional gimbal and camera moves on a rope stretching between those robots. At this time, the three robots are capable of efficient, highly accurate wide-ranging observation by carrying out synchronous position control using wireless communication. The control system has optimum synchronous position capabilities and uses a disturbance observer. Regarding this infrastructure inspection robotics system, this study discusses the development of three mobile robotics systems and the synchronous position control of two robots.
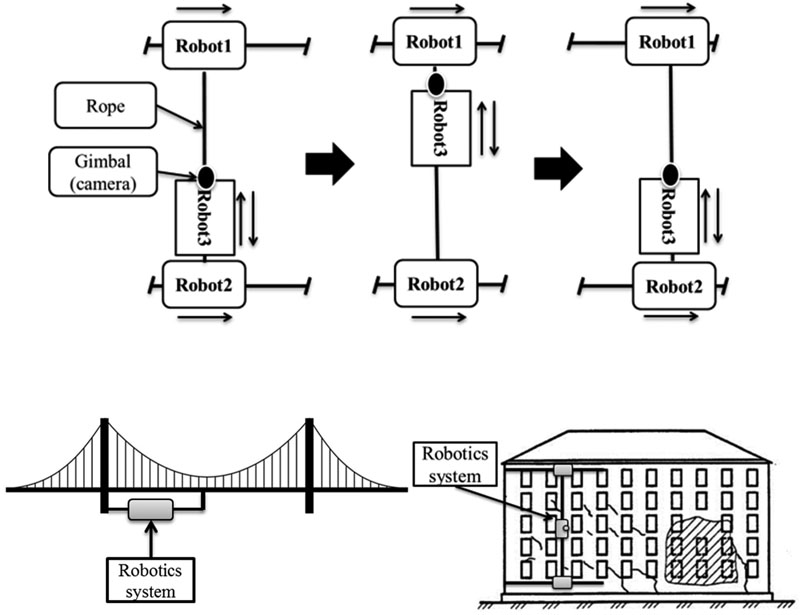
Concept diagram of the proposed mobile robotics system for infrastructure inspection
- [1] Y. Fujino, “Introduction to On-site Demonstrations of Next-generation Robotic Technologies for Social Infrastructures, Organized by Advisory Committee on Bridges’ Maintenance,” J. of the Robotics Society of Japan, Vol.34, No.9, 2016 (in Japanese).
- [2] National Transportation Safety Board, “Highway Accident Report: Collapse of I-35W Highway Bridge Minneapolis, Minnesota August 1, 2007,” HAR-08-03, 2008.
- [3] A. B. Mehrabi, “In-service evaluation of cable-stayed bridges, overview of available methods and finding,” J. of Bridge Engineering, Vol.11, No.6, pp. 716-724, 2006.
- [4] Ministry of Land, Infrastructure, Transport and Tourism, “Ministerial Ordinance on Draft Maintenance,” 2014.
- [5] U.S. Department of Transportation, “2015 Status of the Nation’s Highways, Bridges and Transit: Conditions and Performance,” Federal Highway Administration, January 2017.
- [6] W. C. Myeong, K. Y. Jung, S. W. Jung, Y. H. Jung, and H. Myung, “Development of a Drone-Type Wall-Sticking and Climbing Robot,” 12th Int. Conf. on Ubiquitous Robots and Ambient Intelligence (URAI 2015), October 2015.
- [7] M. J. Henriques and D. Roque, “Unmanned Aerial Vehicles (UAV) as a Support to Visual Inspection of Concrete Dams,” Second Int. Dam World Conf., April 2015.
- [8] A. Reem, T. Terek, and M. Fahad, “Site Inspection Drone: A Solution for Inspecting and Regulating Construction Sites,” IEEE 59th Int. Midwest Symp. on Circuits and Systems (MWSCAS), October 2016.
- [9] S. Sato and T. Anezaki, “Autonomous Flight Drone for Infrastructure (Transmission Line) Inspection (2),” 2017 Int. Conf. on Intelligent Informatics and Biomedical Sciences (ICIIBMS), pp. 294-296, 2017.
- [10] Y. Takada, Y. Tokura, Y. Matsumura, T. Tanaka, and T. Kanada, “Wall Inspection Robot with Maneuvering Assist Control System Against Crosswind,” J. Robot. Mechatron., Vol.30, No.3, pp. 416-425, 2018.
- [11] H. Nakanishi and H. Hashimoto, “AR-Marker/IMU Hybrid Navigation System for Tether-Powered UAV,” J. Robot. Mechatron., Vol.30, No.1, pp. 76-85, 2018.
- [12] F. Xu, X. Wang, and L. Wang, “Cable Inspection Robot for Cable-Stayed Bridges: Design, Analysis, and Application,” J. of Field Robotics, Vol.28, Issue 3, pp. 441-459, 2011.
- [13] T. Yukawa, M. Suzuki, Y. Satoh, and H. Okano, “Magnetic part design of pipe-surface inspection robot,” 32nd Annual Conf. of the IEEE Industrial Electronics, 2006.
- [14] A. Baghani, M. Nili, and A. A. Harati, “Kinematics Modeling of a Wheel-Based Pole Climbing Robot (UT-PCR),” Int. Conf. on Robotics and Automation Barcelona, 2005.
- [15] K. Toussaint, N. Pouliot, and S. Montambault, “Transmission Line Maintenance Robots Capable of Crossing Obstacles: State-of-the-Art Review and Challenges Ahead,” J. of Field Robotics, Vol.26, Issue 5, pp. 477-499, 2009.
- [16] K. H. Cho, Y. H. Jin, H. M. Kim, H. Moon, J. C. Koo, and H. R. Choi, “Caterpillar-based Cable Climbing Robot for Inspection of Suspension Bridge Hanger Rope, ” IEEE Int. Conf. on Automation Science and Engineering, pp. 1059-1062, 2013.
- [17] X. Qin, G. Wu, X. Ye, L. Huang, and J. Lei, “A Novel Method to Reconstruct Overhead High-Voltage Power Lines Using Cable Inspection Robot LiDAR Data,” Remote sensing, Vol.9, Issue 7, pp. 1-21, 2017.
- [18] T. Doi, R. Hodoshima et al., “Development of Quadruped Walking Robot TITAN XI for Steep Slopes – Slope Map Generation and Map Information Application,” J. Robot. Mechatron., Vol.18, No.3, pp. 318-324, 2006.
- [19] H. Nakanishi, M. Yamazumi, S. Karakama, M. Oda, S. Nishida, H. Kato, K. Watanabe, A. Ueta, M. Yoshii, and S. Suzuki, “On-Orbit Demonstration of Tether – Based Robot Locomotion in REX-J Mission,” J. Robot. Mechatron., Vol.29, No.5, pp. 792-800, 2017.
- [20] N. Kanrhira, M. Hirai, S. Kashimoto, and S. Echigo, “Bridge Mounting Multicopter for Bridge Inspection,” Kawada Technical, Vol.36, pp. 22-28, 2017 (in Japanese).
- [21] D. V. Smitherman, Jr., “Space Elevators. An Advanced Earth-Space Infrastructure for the New Millennium,” University Press of the Pacific, 2006.
- [22] T. Egami, A. Nagashima, and K. Umemoto, “Lift Stabilization Control for an Experimental Space Elevator Climber for a Rope-type Tether using a CMG Unit,” J. of the Robotics Society of Japan, Vol.35, No.1, pp. 47-54, 2017 (in Japanese).
- [23] Y. Tan, T. Egami, and T. Murata, “Method for Optimal Synchronous Position Control and Its Application to a Linear X-Y Table,” Proc. of Measurement Automatic Control Society, Vol.62, No.598, pp. 47-54, 1996 (in Japanese).
- [24] K. Ohnishi, M. Shibata, and T. Murakami, “Motion control for advanced mechatronics,” IEEE/ASME Trans. on Mechatronics, Vol.1, No.1, pp. 56-67, March 1996.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.