Paper:
Indoor Self-Localization Using Multiple Magnetic Sensors
Isaku Nagai*, Jun Sakai**, and Keigo Watanabe*
*Graduate School of Natural Science and Technology, Okayama University
3-1-1 Tsushima-naka, Kita-ku, Okayama-shi, Okayama 700-8530, Japan
**Kusatsu Facility, OMRON Corporation
2-2-1 Nishi-kusatsu, Kusatsu-shi, Shiga 525-0035, Japan

This study proposes an indoor self-localization for the estimation of the position and posture of an instrument using multiple magnetic sensors. First, a magnetic map for the localization is efficiently created using multiple sensors and a local positioning device made from an optical sensor and a gyroscope. For the localization estimating trajectories, the measurement error of the local positioning is corrected by matching it with the magnetic map. Our instrument is composed of six magnetic sensors, and the description of the self-localization details is based on the framework of a particle filter. The experimental results show better indoor path trajectories compared with a raw trajectory without map matching. The accuracy of the instrument using various numbers of magnetic sensors for the estimation is also investigated.
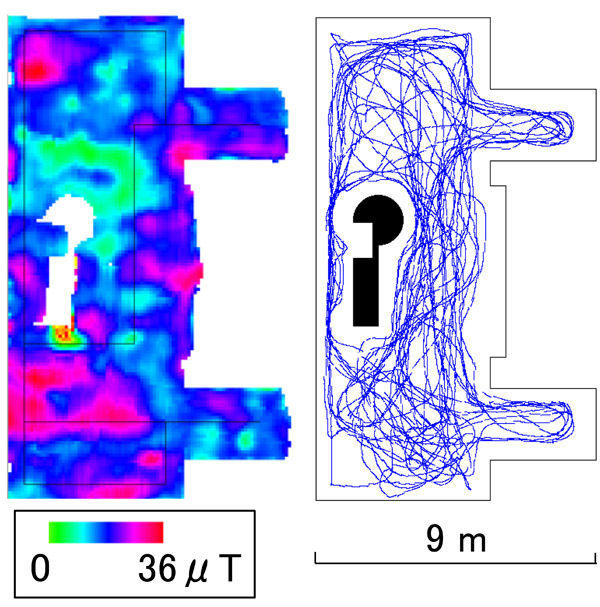
Magnetic map and estimated trajectory
- [1] K. Alonzo, “Linearized error propagation in odometry,” The Int. J. of Robotics Research, Vol.23, No.2, pp. 179-218, 2004.
- [2] F. Dellaert, D. Fox, W. Burgard, and S. Thrun, “Monte Carlo localization for mobile robots,” Proc. IEEE Int. Conf. on Robotics and Automation, pp. 1322-1328, 1999.
- [3] K. Kodaka, H. Niwa, and S. Sugano, “Rotation-based dynamic localization at an initial dead-zone avoidance stage on an RFID tag lattice,” J. Robot. Mechatron., Vol.21, No.4, pp. 460-468, 2009.
- [4] D. Iwakura and K. Nonami, “Indoor localization of flying robot by means of infrared sensors,” J. Robot. Mechatron., Vol.25, No.1, pp. 201-210, 2013.
- [5] M. Yokozuka, Y. Suzuki, T. Takei, N. Hashimoto, and O. Matsumoto, “Auxiliary particle filter localization for intelligent wheelchair systems in urban environments,” J. Robot. Mechatron., Vol.22, No.6, pp. 758-766, 2010.
- [6] J. Eguchi and K. Ozaki, “Development of method using a combination of DGPS and scan matching for the making of occupancy grid maps for localization,” J. Robot. Mechatron., Vol.25, No.3, pp. 506-514, 2013.
- [7] T. Suzuki, Y. Amano, and T. Hashizume, “6-DOF localization for a mobile robot using outdoor 3D point clouds,” J. Robot. Mechatron., Vol.22, No.2, pp. 158-166, 2010.
- [8] D. Navarro and G. Benet, “Magnetic map building for mobile robot localization purpose,” IEEE Conf. on Emerging Technologies & Factory Automation, pp. 1-4, 2009.
- [9] J. Haverinen and A. Kemppainen, “Global indoor self-localization based on the ambient magnetic field,” Robotic and Autonomous Systems, No.57, pp. 1028-1035, 2009.
- [10] X. Lu, Y. Dong, and X. Wang, “A Monte Carlo localization algorithm for 2-D indoor self-localization based on magnetic field,” 8th Int. Conf. on Communications and Networking, pp. 563-568, 2013.
- [11] N. Akai, K. Inoue, and K. Ozaki, “Autonomous navigation based on magnetic and geometric landmarks on environmental structure in real world,” J. Robot. Mechatron., Vol.26, No.2, pp. 158-165, 2014.
- [12] C. E. Galván-Tejada, J. P. García-Vázquez, and R. F. Brena, “Magnetic field feature extraction and selection for indoor location estimation,” Sensors, No.14, Vol.6, pp. 11001-11015, 2014.
- [13] B. Gozick, K. P. Subbu, R. Dantu, and T. Maeshiro, “Magnetic maps for indoor navigation,” IEEE Trans. on Instrumentation and Measurement, Vol.60, No.12, pp. 3883-3891, 2011.
- [14] P. K. Binu, R. A. Krishnan, and A. P. Kumar, “An efficient indoor location tracking and navigation system using simple magnetic map matching,” IEEE Int. Conf. on Computational Intelligence and Computing Research, pp. 1-7, 2016.
- [15] H. G. Xu, C. X. Wang, R. Q. Yang, and M. Yang, “Extended Kalman Filter based magnetic guidance for intelligent vehicles,” 2006 IEEE Intelligent Vehicles Symp., pp. 169-175, 2006.
- [16] A. M. Sabatini, “Kalman-filter-based orientation determination using inertial/magnetic sensors: observability analysis and performance evaluation,” Sensors, Vol.11, No.10, pp. 9182-9206, 2011.
- [17] S. A. Rahok and K. Ozaki, “Odometry correction with localization based on landmarkless magnetic map for navigation system of indoor mobile robot,” 4th Int. Conf. on Autonomous Robots and Agents, pp. 572-577, 2009.
- [18] N. Akai and K. Ozaki, “Gaussian processes for magnetic map-based localization in large-scale indoor environments,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 4459-4464, 2015.
- [19] N. Akai and K. Ozaki, “3D magnetic field mapping in large-scale indoor environment using measurement robot and gaussian processes,” Int. Conf. on Indoor Positioning and Indoor Navigation, pp. 1-7, 2017.
- [20] B. Brzozowski and K. Kaźmierczak, “Magnetic field mapping as a support for UAV indoor navigation system,” IEEE Int. Workshop on Metrology for AeroSpace, pp. 583-588, 2017.
- [21] P. Robertson et al., “Simultaneous localization and mapping for pedestrians using distortions of the local magnetic field intensity in large indoor environments,” Int. Conf. on Indoor Positioning and Indoor Navigation, pp. 1-10, 2013.
- [22] I. Nagai, G. Yamauchi, K. Nagatani, K. Watanabe, and K. Yoshida, “Positioning device for outdoor mobile robots using optical sensors and lasers,” Advanced Robotics, Vol.27, No.15, pp. 1147-1160, 2013.
- [23] D. Gebre-Egziabher, G. H. Elkaim, J. D. Powell, and B. W. Parkinson, “Calibration of strapdown magnetometers in magnetic field domain,” J. of Aerospace Engineering, Vol.19, No.2, pp. 87-102, 2006.
- [24] V. Renaudin, M. H. Afzal, and G. Lachapelle, “New method for magnetometers based orientation estimation,” IEEE/ION Position, Location and Navigation Symp., pp. 348-356, 2010.
- [25] M. Frassl, M. Angermann, M. Lichtenstern, P. Robertson, B. J. Julian, and M. Doniec, “Magnetic maps of indoor environments for precise localization of legged and non-legged locomotion,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 913-920, 2013.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.