Paper:
Choice of Muscular Forces for Motion Control of a Robot Arm with Biarticular Muscles
Tetsuya Morizono*, Kenji Tahara**, and Hitoshi Kino*
*Fukuoka Institute of Technology
3-30-1 Wajiro-Higashi, Higashi-ku, Fukuoka City, Fukuoka 811-0295, Japan
**Kyushu University
744 Moto’oka, Nishi-ku, Fukuoka City, Fukuoka 819-0395, Japan

The contribution of biarticular muscles to the control of robotic arms and legs has recently attracted great interest in the field of robotics. The advantages of using biarticular muscles under kinetic interaction with the external environment have been well studied; however, the contribution of the muscles to the motion control of articulated robot arms under no kinetic interaction appears to remain an unclear issue, especially for robot arms of which the muscles are directly anchored to their links, which induces a change in the moment arms to allow the muscles to generate joint torques and permit point-to-point motion control to their desired postures in a feedforward manner with constant muscular forces. This paper presents a case study in which the role of biarticular muscles in the motion control of an articulated robot arm was investigated, focusing on the feature of its redundancy actuation, which allows an arbitrary choice from infinite combinations of muscular forces, realizing motion control to a desired posture. The numerical analysis in this paper addresses three typical combination choices. Mappings from muscular forces to desired postures are calculated in the analysis of the three choices. The simulation results of motion control executed according to the three mappings are also analyzed. The analysis indicates the interesting results that biarticular muscles do not contribute to the desired postures and that a very weak dependence property of monoarticular muscles on the desired postures exists for a particular choice. The simulation results also demonstrate that the implementation of one choice results in a degraded motion control performance as compared with that of the two other choices.
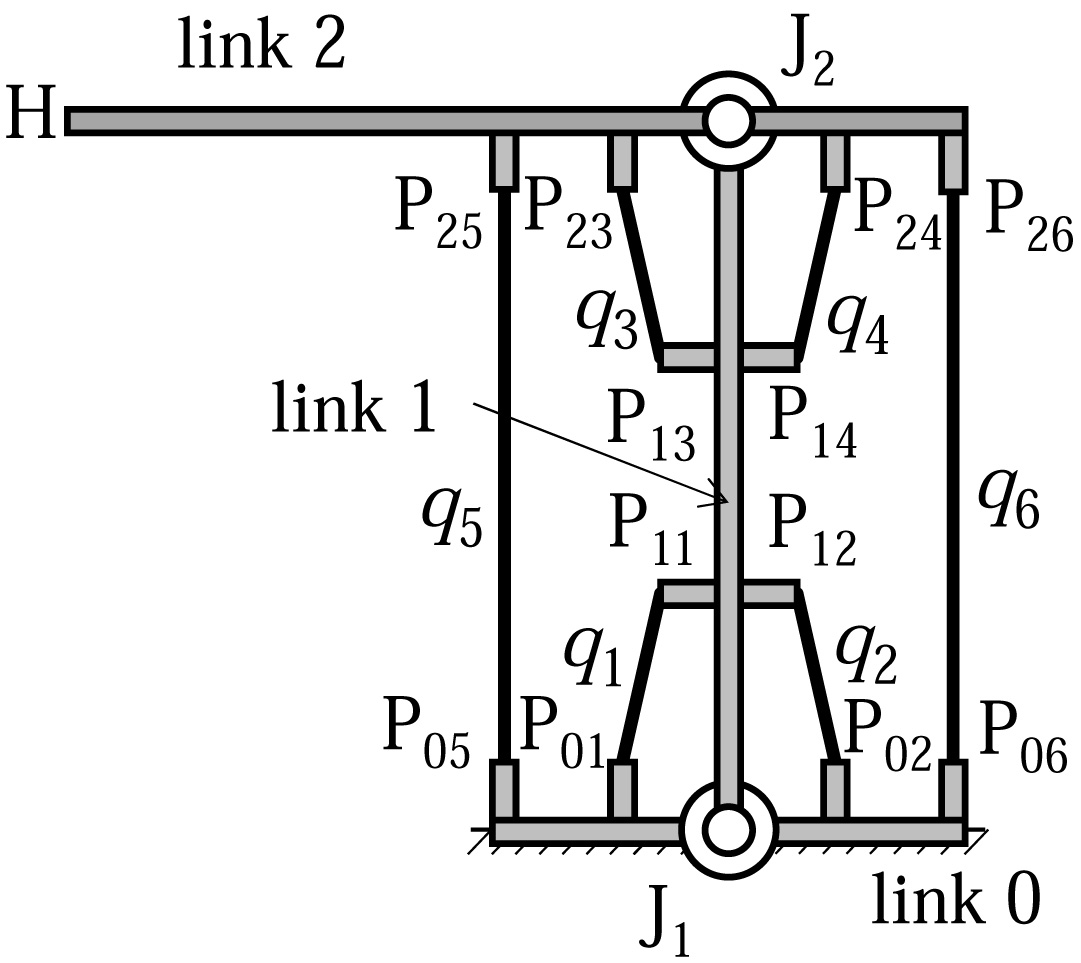
The model of a robot arm with biarticular muscles
- [1] G. J. V. I. Schenau, “From rotation to translation: Constraints on multi-joint movements and the unique action of bi-articular muscles,” Human Movement Science, Vol.8, No.4, pp. 301-337, 1989.
- [2] T. Oshima, N. Momose, K. Koyanagi, T. Matsuno, and T. Fujikawa, “Jumping mechanism imitating vertebrate by the mechanical function of bi-articular muscle,” 2007 Int. Conf. on Mechatronics and Automation, pp. 1920-1925, August 2007.
- [3] T. Kaneko, K. Ogata, S. Sakaino, and T. Tsuji, “Impact force control based on stiffness ellipse method using biped robot equipped with biarticular muscles,” 2015 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 2246-2251, September 2015.
- [4] Y. Nakata, A. Ide, Y. Nakamura, K. Hirata, and H. Ishiguro, “Hopping by a monopedal robot with a biarticular muscle by compliance control – an application of an electromagnetic linear actuator –,” J. Robot. Mechatron., Vol.25, No.1, pp. 106-114, 2013.
- [5] M. Kumamoto, T. Oshima, and T. Yamamoto, “Control properties induced by the existence of antagonistic pairs of bi-articular muscles – mechanical engineering model analyses,” Human Movement Science, Vol.13, No.5, pp. 611-634, 1994.
- [6] V. Salvucci, Y. Kimura, S. Oh, and Y. Hori, “Force maximization of biarticularly actuated manipulators using infinity norm,” IEEE/ASME Trans. on Mechatronics, Vol.18, No.3, pp. 1080-1089, June 2013.
- [7] T. Baratcart, V. Salvucci, and T. Koseki, “Experimental verification of two-norm, infinity-norm continuous switching implemented in resolution of biarticular actuation redundancy,” Advanced Robotics, Vol.29, No.19, pp. 1243-1252, 2015.
- [8] K. Tahara, Y. Matsutani, D. Nakagawa, M. Sato, and H. Kino, “Variable combination of feed-forward and feedback manners for setpoint control of a musculoskeletal arm considering the maximum exertable muscular force,” IECON 2016 – 42nd Annual Conf. of the IEEE Industrial Electronics Society, pp. 815-820, Octber 2016.
- [9] V. Salvucci, Y. Kimura, S. Oh, and Y. Hori, “Biwi: Bi-articularly actuated and wire driven robot arm,” 2011 IEEE Int. Conf. on Mechatronics, pp. 827-832, April 2011.
- [10] T. Oshima, T. Fujikawa, and M. Kumamoto, “Control of elasticity and trajectory of robot arm with redundant actuators,” J. Robot. Mechatron., Vol.14, No.3, pp. 253-261, 2002.
- [11] H. Kino, S. Kikuchi, Y. Matsutani, K. Tahara, and T. Nishiyama, “Numerical analysis of feedforward position control for non-pulley musculoskeletal system: a case study of muscular arrangements of a two-link planar system with six muscles,” Advanced Robotics, Vol.27, No.16, pp. 1235-1248, 2013.
- [12] Y. Matsutani, K. Tahara, H. Kino, and H. Ochi, “Complementary compound set-point control by combining muscular internal force feedforward control and sensory feedback control including a time delay,” Advanced Robotics, Vol.32, No.8, pp. 411-425, 2018.
- [13] T. Oshima, T. Fujikawa, and M. Kumamoto, “Coordination control of arm using antagonistic actuators,” J. Robot. Mechatron., Vol.14, No.3, pp. 270-277, 2002.
- [14] T. Morizono, K. Tahara, and H. Kino, “Experimental investigation of contribution of biarticular actuation to mappings between sensory and motor spaces,” IECON 2015 – 41st Annual Conf. of the IEEE Industrial Electronics Society, pp. 3573-3578, November 2015.
- [15] T. Morizono, K. Tahara, and H. Kino, “A study on effect of biarticular muscles in an antagonistically actuated robot arm through numerical simulations,” Artificial Life and Robotics, Vol.22, No.1, pp. 74-82, 2017.
- [16] H. Okada, M. Ae, N. Fujii, and Y. Morioka, “Body segment inertia properties of Japanese elderly,” Biomechanisms, Vol.13, pp. 125-139, 1996 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.