Review:
Development of Myoelectric Robotic/Prosthetic Hands with Cybernetic Control at the Biological Systems Engineering Laboratory, Hiroshima University
Toshio Tsuji*, Taro Shibanoki**, Go Nakamura***, and Akira Furui*
*Hiroshima University
1-4-1 Kagamiyama, Higashi-Hiroshima 739-8527, Japan
**Ibaraki University
4-12-1 Nakanaursawacho, Hitachi 316-8511, Japan
***Robot Rehabilitation Center, Hyogo Institute of Assistive Technology
1070 Akebonocho, Nishiku, Kobe 651-2181, Japan

This review introduces our developed robotic/prosthetic hands and explains the myoelectric control of the robotic hand with five fingers, which is based on muscle synergy and a motion generation model. To realize a “human-like” robotic hand, it is necessary to fully understand the inherent features of human as well as machine and take a complementary approach with hardware that incorporates advanced engineering technology and software that is compatible with a living body.
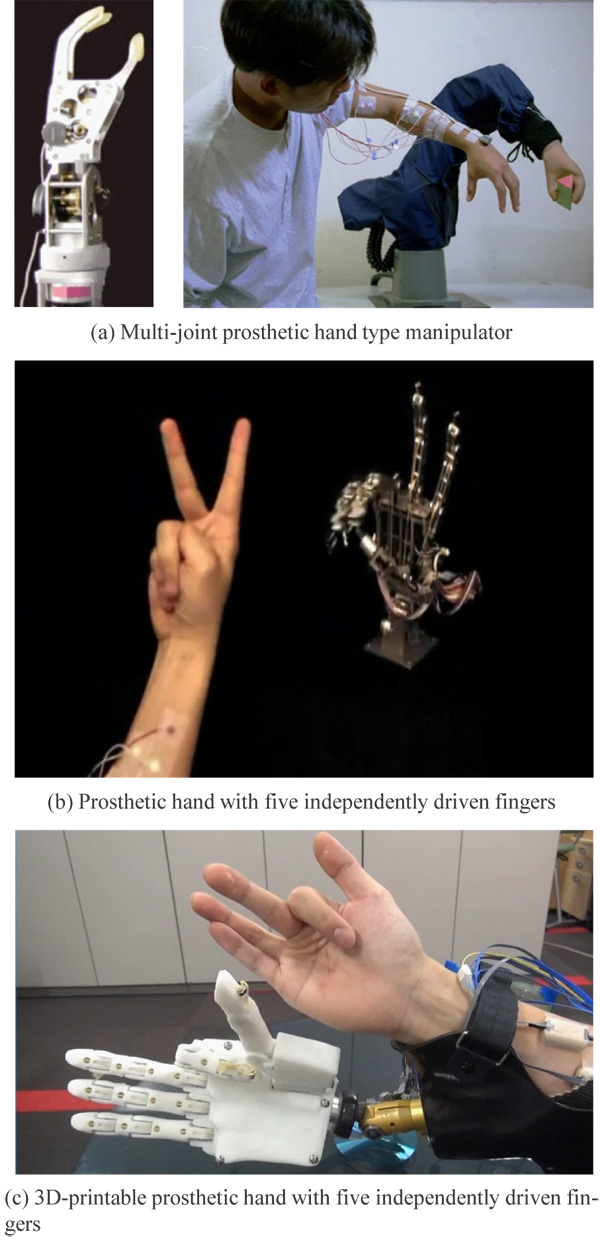
Three types of myoelectric robotic/prosthetic hands
- [1] N. Wiener, “Cybernetics: or control and communication in the animal and the machine,” MIT Press, 1948.
- [2] I. Kato, S. Yamakawa, K. Ichikawa, and M. Sano, “Multifunctional myoelectric hand prosthesis with pressure sensory feedback system: WASEDA Hand-4P,” Proc. 3rd Int. Symp. External Control of Human Extremities, pp. 155-170, 1969.
- [3] R. B. Jerard, T. W. Williams, and C. W. Ohlenbusch, “Practical design of an EMG controlled above elbow prosthesis,” Proc. of Conf. Eng. Devices for Rehabilitation, pp. 73-77, 1974.
- [4] S. C. Jacobson, D. F. Knutti, R. T. Johnson, and H. H. Sears, “Development of the Utah artificial arm,” IEEE Trans. Biomedical Eng., Vol.29, No.4, pp. 249-269, 1982.
- [5] M. C. Carrozza et al., “Design of a cybernetic hand for perception and action,” Biological Cybernetics, Vol.95, No.6, pp. 629-644, 2006.
- [6] S. A. Dalley, T. E. Wiste, T. J. Withrow, and M. Goldfarb, “Design of a multifunctional anthoropomorphic prosthetic hand with extrinsic actuation,” IEEE/ASME Trans. on Mechatronics, Vol.14, No.6, pp. 699-706, 2009.
- [7] L. Natale, G. Metta, and G. Sandini, “Learning haptic representation of objects,” Proc. of Int. Conf. on Intelligent Manipulation and Grasping, 2004.
- [8] I. Yamano and T. Maeno, “Five-fingered robot hand using ultrasonic motors and elastic elements,” Proc. of Int. Conf. on Robotics and Automation, pp. 2684-2689, 2005.
- [9] H. Liu et al., “Multisensory five-fingered dexterous hand: The DLR/HIT Hand II,” Proc. of the 2008 IEEE/RSJ Int. Conf. on Intelligent Robots and System, pp. 3692-3697, 2008.
- [10] D. W. Zhao et al., “Development of a multi-DOF anthropomorphic prosthetic hand,” Proc. IEEE Int. Conf. on Robotics and Biomimetics, pp. 878-883, 2006.
- [11] Y. Kamikawa and T. Maeno, “Underactuated five-finger prosthetic hand inspired by grasping force distribution of humans,” Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 717-722, 2008.
- [12] I. N. Gaiser et al., “The FLUIDHAND III: A multifunctional prosthetic hand,” Am. Acad. Orthot. Prosthet., Vol.21, No.2, pp. 91-96, 2009.
- [13] H. Takeda et al., “Development of prosthetic arm with pneumatic prosthetic hand and tendon-driven wrist,” Annual Int. Conf. of the IEEE EMBS, pp. 5048-5051, 2009.
- [14] T. E. Wiste et al., “Design of a multifunctional anthropomorphic prosthetic hand with extrinsic actuation,” IEEE Int. Conf. on Rehabilitation Robotics, pp. 675-681, 2009.
- [15] N. Fukaya, T. Asfour, R. Dillmann, and S. Toyama, “Development of a five-finger dexterous hand without feedback control: The TUAT/Karlsruhe humanoid hand,” 2013 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, Tokyo, pp. 4533-4540, 2013.
- [16] H. Kawasaki and T. Mouri, “Myoelectric prosthetic hand with high grasping force,” J. Robot. Mechatron, Vol.26, No.1, p. 100, 2014.
- [17] N. Wang, K. La, and X. Zhang, “Design and myoelectric control of an anthropomorphic prosthetic hand,” J. of Bionic Engineering, Vol.14, pp. 47-59, 2017.
- [18] K. F. Gretsch et al., “Development of novel 3D-printed robotic prosthetic for transradial amputees,” Prosthetics and Orthotics Int., Vol.40, No.3, pp. 400-403, 2016.
- [19] R. R. Ma, L. U. Odhner, and A. M. Dollar, “A modular, open-source 3d printed underactuated hand,” IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 2737-2743, 2013.
- [20] J. Zuniga et al., “Cyborg beast: a low-cost 3d-printed prosthetic hand for children with upper-limb differences,” BMC Research Notes, Vol.8, No.1, p. 10, 2015.
- [21] D. Graupe, J. Magnussen, and A. A. M. Beex, “A Microprocessor system for multifunctional control of upper limb prostheses via myoelectric signal identification,” IEEE Trans. Automatic Control, Vol.23, No.4, pp. 538-544, 1978.
- [22] T. Tsuji, K. Ito, and M. Nagamachi, “A limb-function discrimination method using EMG signals for the control of multifunctional powered prostheses,” Trans. Inst. Electron., Inform. Commun. Eng., Vol.J70-D, No.1, pp. 207-215, 1987.
- [23] D. E. Rumelhart, J. L. McClelland, and R. J. Williams, “Learning internal representations by error propagation,” D. E. Rumelhart, J. L. McClelland, the PDP Research Group (Eds.), “Parallel Distributed Processing,” MIT Press, Vol.I, pp. 318-362, 1986.
- [24] M. F. Kelly, P. A. Parker, and R. N. Scott, “The application of neural networks to myoelectric signal analysis: A preliminary study,” IEEE Trans. Biomedical Eng., Vol.37, No.3, pp. 221-230, 1990.
- [25] M. Ohga, M. Takeda, A. Matsubara, A. Koike, and T. Tsuji, “Development of a five-finger prosthetic hand using ultrasonic motors controlled by two EMG signals,” J. Robot. Mechatron., Vol.14, No.6, pp. 565-572, 2001.
- [26] M. Tsukamoto, T. Kondo, and K. Ito, “A prosthetic hand control based on nonstationary EMG at the start of movement,” J. Robot. Mechatron., Vol.19, No.4, pp. 381-387, 2007.
- [27] J. Zhao et al., “A Five fingered underactuated prosthetic hand control scheme,” IEEE Int. Conf. on Mechatronics and Automation, pp. 1453-1458, 2006.
- [28] D. Yang et al., “An anthropomorphic robot hand developed based on underactuated mechanism and controlled by EMG signals,” J. of Bionic Engineering, Vol.6, pp. 255-263, 2009.
- [29] K. Ito, T. Tsuji, A. Kato, and M. Ito, “An EMG-controlled prosthetic forearm in three degrees of freedom using ultrasonic motors,” Proc. Annu. Int. Conf. IEEE Engineering in Medicine and Biology Soc., Vol.14, pp. 1487-1488, 1992.
- [30] O. Fukuda, T. Tsuji, K. Takahashi, and M. Kaneko, “Skill assistance for myoelectric control using an event-driven task model,” Proc. IEEE Int. Conf. Intelligent Robots and Systems, pp. 1445-1450, 2002.
- [31] O. Fukuda, T. Tsuji, M. Kaneko, and A. Otsuka, “A human-assisting manipulator teleoperated by EMG signals and arm motions,” IEEE Trans. on Robotics and Automation, Vol.19, No.2, pp. 210-222, 2003.
- [32] T. Tsuji, T. Shibanoki, K. Shima, T. Takaki, A. Otsuka, and T. Chin, “A novel five-fingered myoelectric prosthetic hand and its muscle synergy-based control,” Bulletin of the Japanese Society of Prosthetics and Orthotics, Vol.26, No.2, pp. 91-96, 2010 (in Japanese).
- [33] T. Takaki, K. Shima, N. Mukaidani, T. Tsuji, A. Otsuka, and T. Chin, “Electromyographic prosthetic hand using grasping-force-magnification mechanism with five independently driven fingers,” Advanced Robotics, Vol.29, Issue 24, pp. 1586-1598, 2015.
- [34] T. Tsuji, A. Furui, and G. Nakamura, “Electromyographic Interface Technology and Robotic Arm Prostheses,” J. of the Japan Society for Precision Engineering, Vol.83, No.11, pp. 1010-1013, 2017 (in Japanese).
- [35] A. d’Avella, P. Saltiel, and E. Bizzi, “Combinations of muscle synergies in the construction of a natural motor behavior,” Nat. Neurosci., Vol.6, No.3, pp. 300-308, 2003.
- [36] T. Tsuji, K. Shima, and Y. Murakami, “Pattern Classification of Combined Motions Based on Muscle Synergy Theory,” J. of the Robotics Society of Japan, Vol.28, No.5, pp. 606-613, 2010 (in Japanese).
- [37] T. Tsuji, N. Bu, O. Fukuda, and M. Kaneko, “A recurrent log-linearized Gaussian mixture network,” Proc. of the IEEE Trans. on Neural Networks, Vol.14, No.2, pp. 304-316, 2003.
- [38] T. Tsuji, K. Shima, N. Bu, and O. Fukuda, “Biomimetic Impedance Control of an EMG-Based Robotic Hand,” A. Jimenez (Eds.), “Robot Manipulators,” IntechOpen, pp. 214-230, 2010.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.