Review:
Humanoid Robot Hand and its Applied Research
Haruhisa Kawasaki and Tetsuya Mouri
Gifu University
1-1 Yanagido, Gifu 501-1193, Japan

Humanoid robot hands are expected to replace human hands in the dexterous manipulation of objects. This paper presents a review of humanoid robot hand research and development. Humanoid hands are also applied to multifingered haptic interfaces, hand rehabilitation support systems, sEMG prosthetic hands, telepalpation systems, etc. The developed application systems in our group are briefly introduced.
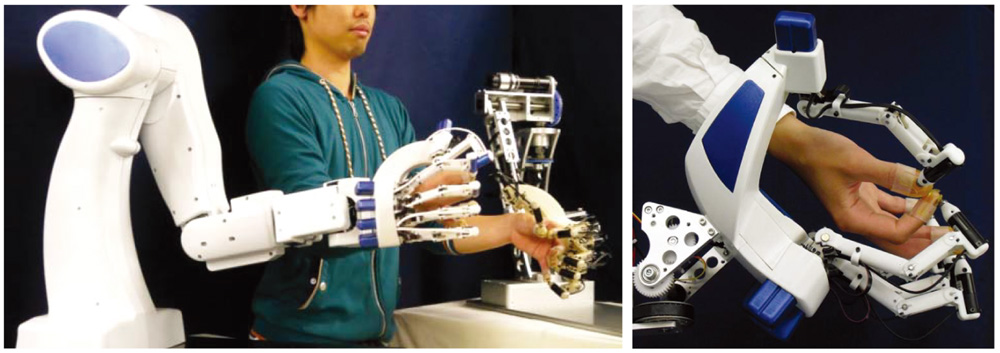
Side-faced multi-fingered haptic interface, SF-HIRO
- [1] J. K. Salisbury and J. J. Craig, “Articulated hands: force control and kinematic issues,” Int. J. of Robotics Research, Vol.1, No.1, pp. 4-17, 1982.
- [2] S. C. Jacobsen, D. F. Wood, D. F. Knutti, and K. B. Biggers, “The Utah/MIT dexterous hand: work in progress,” Int. J. of Robotics Research, Vol.3, No.4, pp. 21-50, 1984.
- [3] M. E. Rosheim, “Robot Evolution – The Developments of Anthrobotics,” John Wiley & Sons, 1994.
- [4] H. Liu, J. Butterfass, S. Knoch, P. Meusel, and G. Hirzinger, “Multisensory articulated hand,” IEEE Control Systems, Vol.19, No.2, pp. 47-54, 1999.
- [5] R. S. Fearing, “Tactile sensing mechanisms,” Int. J. of Robotics Research, Vol.9, No.3, pp. 3-23, 1990.
- [6] R. D. Howe, “Tactile sensing and control of robotic manipulation,” Advanced Robotics, Vol.8, No.3, pp. 245-261, 1994.
- [7] H. Kawasaki and T. Komatsu, “Mechanism design of anthropomorphic robot hand: Gifu hand I,” J. Robot. Mechatron., Vol.11, No.4, pp. 269-273, 1999.
- [8] H. Kawasaki, T. Komatsu, and K. Uchiyama, “Dexterous anthropomorphic robot hand with distributed tactile sensor: Gifu hand II,” IEEE/ASME Trans. on Mechatronics, Vol.7, No.3, pp. 296-303, 2002.
- [9] T. Mouri, H. Kawasaki, K. Yoshikawa, J. Takai, and S. Ito, “Anthropomorphic robot hand: Gifu hand III,” Proc. of ICCAS’02, pp. 1288-1293, 2002.
- [10] T. Mouri and H. Kawasaki, “A novel anthropomorphic robot hand and its master slave system,” M. Hackel (Eds.), “Humanoid Robots, Human-like Machines,” I-Tech Education and Publishing, pp. 29-42, 2007.
- [11] B. Rubinger, M. Brousseau, J. Lymer, C. M. Gosselin, T. Laliberte, and J. Piedboeuf, “A novel robotic hand-SARAH for operations on the international space station,” Proc. of the ASTRA Workshop, 2002.
- [12] T. Takaki and T. Omata, “High-Performance Anthropomorphic Robot Hand With Grasping-Force-Magnification Mechanism,” IEEE-ASME Trans. Mechatronics, Vol.16, No.3, pp. 583-591, 2011.
- [13] T. Mouri, H. Kawasaki, S. Nakagawa, T. Endo, and T. Miura, “High output humanoid robot hand,” Proc. The 30th Annual Conf. of RSJ, RSJ2012AC2O2-3, 2012 (in Japanese).
- [14] M. W. Spong, S. Mutchinson, and M. Vidyasagar, “Robot Modeling and Control,” John Willey & Sons, 2006.
- [15] H. Kawasaki, “Robot Hands and Multi-Fingered Haptic Interfaces: Fundamentals and Applications,” World Scientific Publishing, 2015.
- [16] M. R. Cutkosky and I. Kao, “Computing and controlling the compliance of a robot hand,” IEEE Trans. on Robotics and Automation, Vol.5, No.2, pp. 151-165, 1989.
- [17] K. Kosuge, H. Yoshida, T. Fukuda, K. Kanitani, M. Sakai, and K. Hariki, “Coordinated motion control of manipulators based on impedance control,” J. of the RSJ, Vol.13, No.3, pp. 404-410, 1995 (in Japanese).
- [18] L. Birglen, T. Lalibert, and C. M. Gosselin, “Underactuated Robotic Hands,” Springer Verlag, 2010.
- [19] X. Zheng, R. Nakashima, and T. Yoshikawa, “On dynamic control of finger sliding and object motion in manipulation with mutifingered hands,” IEEE Trans. on Robotics and Automation, Vol.16, No.5, pp. 469-481, 2000.
- [20] T. Yoshikawa and X. Zheng, “Coordinated dynamic hybrid position/force control for multiple robot manipulators handling one constrained object,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 1178-1183, 1990.
- [21] Y. Y. Hwang and I. Toda, “Coordinated control of two direct-drive robots using neural networks,” JSME Int. J. Series C, Mechanical Systems, Vol.37, pp. 335-341, 1994.
- [22] T. Naniwa and S. Arimoto, “Learning control for robot tasks under geometric endpoint constraints,” IEEE Trans. on Robotics and Automation, Vol.2, No.3, pp. 432-441, 1995.
- [23] R. Ozawa, S. Arimoto, S. Nakamura, and J. Bae, “Control of an object with parallel surfaces by a pair of finger robots without object sensing,” IEEE Trans. on Robotics and Automation, Vol.21, No.5, pp. 965-976, 2005.
- [24] Y. Su and Y. Stepanenco, “Adaptive sliding mode coordinated control of multiple robot arms attached to a constrained object,” IEEE Trans. on Systems, Man, and Cybernetics, Vol.25, pp. 871-877, 1995.
- [25] S. Ueki, H. Kawasaki, and T. Mouri, “Adaptive coordinated control of multi-fingered hands with sliding contact,” Proc. of SICE-ICASE Int. Joint Conf., pp. 5893-5898, 2006.
- [26] H. Kawasaki, S. Ueki, and S. Ito, “Decentralized adaptive coordinated control of multiple robot arms without using force sensor,” Automatica, Vol.42, No.3, pp. 481-488, 2006.
- [27] S. Ueki, H. Kawasaki, and T. Mouri, “Adaptive Coordinated Control of Multi-Fingered Robot Hand,” J. Robot. Mechatron., Vol.21, No.1, pp. 36-43, 2009.
- [28] T. Mouri, H. Kawasaki, and S. Ito, “Unknown object grasping strategy imitating human grasping reflex for anthropomorphic robot hand,” J. of Advanced Mechanical Design, Systems, and Manufacturing, Vol.1, No.1, pp. 1-11, 2007.
- [29] H. Kawasaki and T. Mouri, “Design and control of five-fingered haptic interface opposite to human hand,” IEEE Trans. on Robotics, Vol.23, No.5, pp. 909-918, 2007.
- [30] H. Kawasaki, M. Kayukawa, H. Sakaeda, and T. Mour, “Learning System for Myoelectric Prosthetic Hand Control by Forearm Amputees,” Proc. of ROMAN2014, pp. 899-904, 2014.
- [31] T. Mouri, H. Kawasaki, T. Aoki, Y. Nishimoto, S. Ito, and S. Ueki, “Telerehabilitation for Fingers and Wrist Using a Hand Rehabilitation Support System and Robot Hand,” Preprints of SYROCO’09, pp. 751-756, 2009.
- [32] T. Mouri, Y. Imada, Y. Ishigure, and H. Kawasaki, “Haptic interface robotic measurement system for breast engorgement,” Proc. of BMEI’12, pp. 670-675, 2012.
- [33] V. Daniulaitis, M. O. Alhalabi, H. Kawasaki, Y. Tanaka, and T. Hori, “Medical palpation of deformable tissue using physics-based model for Haptic Interface RObot (HIRO),” Proc. of IROS2004, pp. 3907-3911, 2004.
- [34] T. Mouri, H. Kawasaki, Y. Nishimoto, T. Aoki, Y. Ishigure, and M. Tanahashi, “Robot Hand Imitating Disabled Person for Education/Training of Rehabilitation,” J. Robot. Mechatron., Vol.20, No.2, pp. 280-288, 2008.
- [35] Y. Adachi, T. Kumano, A. Ikemoto, A. Hattori, and M. Suzuki, “Development of a haptic device for multi fingers by macro-micro structure,” J. of the RSJ, Vol.20, No.7, pp. 725-733, 2002 (in Japanese).
- [36] M. Montoy, M. Oyarzabal, M. Ferre, A. Campos, and J. Barrio, “MasterFinger: multi-finger haptic interface for collaborative environment,” Proc. of EuroHaptics2008, pp. 411-419, 2008.
- [37] H. Kawasaki and T. Hayashi, “Force Feedback Glove for Manipulation of Virtual Objects,” J. Robot. Mechatron., Vol.5, No.1, pp. 79-84, 1993.
- [38] H. Kawasaki, J. Takai, Y. Tanaka, C. Murad, and T. Mouri, “Control of multi-fingered haptic interface opposite to human hand,” Proc. of IROS’03, pp. 2707-2712, 2003.
- [39] H. Kawasaki and T. Mouri, “Design and control of five-fingered haptic interface opposite to human hand,” IEEE Trans. on Robotics, Vol.23, No.5, pp. 909-918, 2007.
- [40] T. Endo, H. Kawasaki, T. Mouri, Y. Ishigure, H. Shimomura, M. Matsumura, and K. Koketsu, “Five-fingered haptic interface robot: HIRO III,” IEEE Trans. on Haptics, Vol.4, No.1, pp. 14-27, 2011.
- [41] O. Halabi, V. Daniulaitis, H. Kawasaki, T. Mouri, and Y. Ohtuka, “Future Haptic Science Encyclopedia: Realistic Stable Haptic Interaction with Highly Deformable Objects Using HIRO-II,” J. Robot. Mechatron., Vol.18, No.4, pp. 409-417, 2006.
- [42] T. Kawai, T. Mouri, T. Endo, and H. Kawasaki, “Breast cancer palpation training system using five-fingered haptic interface robot and GPGPU,” Proc. of AROB’13, pp. 547-550, 2013.
- [43] T. Endo, S. Tanimura, and H. Kawasaki, “Development of tool-type devices for a multi-fingered haptic interface robot,” IEEE Trans. on Robotics, Vol.29, No.1, pp. 68-81, 2013.
- [44] T. Endo and H. Kawasaki, “A Fine Motor Skill Training System Using Multi-Fingered Haptic Interface Robot,” Int. J. of Human-Computer Studies, Vol.84, pp. 41-50, 2015.
- [45] M. Hioki, H. Kawasaki, H. Sakaeda, Y. Nishimoto, and T. Mouri, “Finger rehabilitation support system using a multifingered haptic interface controlled by a surface electromyogram,” J. of Robotics, Article ID 167516, 2011.
- [46] H. Kawasaki, S. Nanmo, T. Mouri, and S. Ueki, “Virtual Robot Teaching for Humanoid Hand Robot Using Muti-Fingered Haptic Interface,” Proc. of CCCA’11, 2011.
- [47] T. Endo, H. Aoyama, S. Nakagawa, and H. Kawasaki, “Haptic Display by a Side-Faced-Type Multi-Fingered Haptic Interface,” Preprint of SYROCO 2012, pp. 367-372, 2012.
- [48] R. S. Johanson and A. B. Vallbo, “Tactile Sensibility in the Human Hand: Relative and Absolute Densities of Four Types of Mechanoreceptive Units in Glabrous Skin,” J. of Physiol, Vol.286, pp. 283-300, 1979.
- [49] H. Kawasaki, Y. Doi, S. Koide, T. Endo, and T. Mouri, “Hand Haptic Interface Incorporating 1D Finger Pad and 3D Fingertip Force Display Devices,” Proc. of ISIE 2010, pp. 1869-1874, 2010.
- [50] T. Endo, A. Kusakabe, Y. Kazama, and H. Kawasaki, “Haptic Interface for Displaying Softness at Multiple Fingers: Combining a Side-Faced-Type Multi-Fingered Haptic Interface Robot and Improved Softness-Display Devices,” IEEE/ASME Trans. on Mechatronics, Vol.21, No.5, pp. 2343-2351, 2016.
- [51] X. Yang, W. F. Bischof, and P. Boulanger, “Perception of Haptic Force Magnitude during Hand Movements,” Proc. of ICRA2008, pp. 2061-2066, 2008.
- [52] I. Elhajj, H. Weerasinghe, A. Dika, and R. Hansen, “Human Perception of Haptic Force Direction,” Proc. of IROS2006, pp. 989-993, 2006.
- [53] H. Kawasaki, Y. Ohtuka, S. Koide, and T. Mouri, “Perception and Haptic Rendering of Friction Moments,” IEEE Trans. on Haptics, Vol.4, No.1, pp. 28-38, 2011.
- [54] T. Endo, T. Kanno, M. Kobayashi, and H. Kawasaki, “Human Perception Test of Discontinuous Force and a Trial of Skill Transfer Using a Five-Fingered Haptic Interface,” J. of Robotics, Vol.2010, Article ID 542360, 2010.
- [55] J. Park, A. J. Doxon, W. R. Provancher, D. E. Johnson, and H. Z. Hong, “Edge Sharpness Perception with Force and Contact Location Information,” Proc. of WHC2011, pp. 21-24, 2011.
- [56] L. B. Prorquis, M. Konyo, and S. Tadokoro, “Enhancement of Human Force Perception by Multi-point Tactile Stimulation,” Proc. of IROS2011, pp. 3488-3493, 2011.
- [57] H. Kawasaki and T. Mouri, “Force Discrimination Using Improved Hand Haptic Interface,” Proc. of ISCEAS 2015, pp. 372-381, 2015.
- [58] S. A. Dalley, T. E. Wiste, T. J. Withrow, and M. Goldfarb, “Design of a multifunctional anthropomorphic prosthetic hand with extrinsic actuation,” IEEE/ASME Trans. on Mechatronics, Vol.14, No.6, pp. 699-706, 2009.
- [59] N. Bu, M. Okamoto, and T. Tsuji, “A hybrid motion classification approach for EMG-based human-robot interface using Bayesian and neural networks,” IEEE Trans. on Robotics, Vol.25, No.3, pp. 502-511, 2009.
- [60] T. Hara, H. Kawasaki, and T. Mouri, “Development of a Prosthetic Hand Having High Grasp Force and 2-dof Wrist,” Proc. of IEEE BIOROB 2010 Workshop: “Bridging Human Hand Research and the Development of Robotic Technology for Hands,” 2010.
- [61] M. Hioki and H. Kawasaki, “Estimation of Finger Joint Angles From sEMG Using a Neural Network Including Time Delay Factor and Recurrent Structure,” ISRN Rehabilitation, Vol.2012, 2012.
- [62] M. H. Asyal, M. Yilamaz, M. Tokmakc, K. Sedef, B. H. Aksebzec, and R. Mittal, “Design and implementation of a voice-controlled prosthetic hand,” Turk J. Elec. Eng. & Comp. Sci., Vol.19, No.1, pp. 33-46, 2011.
- [63] H. Kawasaki, T. Mouri, K. Iwase, and H. Sakaeda, “Prosthetic Hand Control Using Speech and sEMG,” Proc. of the 2014 IEEE Int. Conf. on Robotics and Biomimetics, pp. 1136-1141, 2014.
- [64] C. G. Burger, P. S. Lum, P. C. Shor, and H. F. Machiel Van der Loos, “Development of robots for rehabilitation therapy: The Palo Alto VA/Stanford experience,” J. of Rehabilitation Research and Development, Vol.37, No.6, pp. 663-673, 2000.
- [65] R. T. Lauer, K. L. Kilgore, and P. H. Peckham, “The function of the finger intrinsic muscles in response to electrical stimulation,” IEEE Trans. Rehabilitation Engineering, Vol.7, No.1, pp. 19-26, 1999.
- [66] J. Oblak, I. Cikajlo, and Z. Matjacic, “Universal haptic drive: a robot for arm and wrist rehabilitation,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.18, No.3, pp. 293-302, 2010.
- [67] L. Dovat, O. Lambercy, R. Gassert, T. Maeder, T. Milner, T. C. Leong, and E. Burdet, “HandCARE: a cableactuated rehabilitation system to train hand function after stroke,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.16, No.6, pp. 582-591, 2008.
- [68] D. Jack, “Virtual reality-enhanced stroke rehabilitation,” IEEE Trans. Neural Systems and Rehabilitation Engineering, Vol.9, No.3, pp. 308-318, 2001.
- [69] M. Gutiérrez, P. Lemoine, D. Thalman, and F. Vexo, “Telerehabilitation: Controlling haptic virtual environments through handheld interfaces,” Proc. of VRST’04, pp. 195-200, 2004.
- [70] N. Petroff et al., “Fuzzy-Control of a Hand Orthosis for Rehabilitation Tip Pinch, Lateral Pinch, and Cylindrical Prehensions to Patients with Elbow Flexion Intact,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.9, No.2, pp. 225-231, 2001.
- [71] H. Kawasaki, S. Kimura, S. Ito, Y. Nishimoto, H. Hayashi, and H. Sakaed, “Hand Rehabilitation Support System Based on Self-Motion Control, with a Clinical Case Report,” Proc. of WAC 2006, 2006.
- [72] S. Ito, H. Kawasaki, Y. Ishigure, M. Natsume, T. Mouri, and Y. Nishimoto, “A design of fine motion assist equipment for disabled hand in robotic rehabilitation system,” J. of the Franklin Institute, Vol.348, Issue 1, pp. 79-89 , 2011.
- [73] S. Ueki, H. Kawasaki, S. Ito, Y. Nishimoto, M. Abe, T. Aoki, Y. Ishigure, T. Ojika, and T. Mouri, “Development of a hand-assist robot with multi-degrees-of-freedom for rehabilitation therapy,” IEEE/ASME Trans. on Mechatronics, Vol.17, No.1, pp. 136-146, 2012.
- [74] W. Yoon, T. Goshozono, H. Kawabe, M. Kinami, Y. Tsumaki, M. Uchiyama, M. Oda, and T. Doi, “Model-Based Teleoperation of a Space Robot on ETS-VII Using a Haptic Interface,” Proc. of ICRA 2001, pp. 407-412, 2001.
- [75] P. Berkelman, “The University of Hawaii Teleoperated Robotic Surgery System,” Proc. of IROS 2007, pp. 2565-2566, 2007.
- [76] A. Heuser, H. Kourtev, S. Winter, D. Fensterheim, G. Burdea, V. Hentz, and P. Forducey, “Telerehabilitation Using the Rutgers Master II Grove Following Carpal Tunnel Release Surgery: Proof-of-Concept,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.15, No.1, pp. 43-49, 2007.
- [77] T. Mouri, H. Kawasaki, T. Aoki, Y. Nishimoto, S. Ito, and S. Ueki, “Tele-rehabilitation for Fingers and Hand,” Proc. of Automatics 2008, pp. 965-967, 2008.
- [78] G. Hwang, P. Chantanakajornfung, and H. Hashimoto, “Versatile Robotic Biomanipulation with Haptic Interface,” J. Robot. Mechatron., Vol.19, No.5, pp. 585-591, 2007.
- [79] M. P. W. J. van Osch, D. Bera, Y. Koks, and K. M. van Hee, “Tele-Operated Service Robots for Household and Care, Gerontechnology,” Vol.11, No.2, pp. 225-226, 2012.
- [80] D. A. Lawrence, “Stability and Transparency in Bilateral Teleoperation,” IEEE Trans. on Robotics and Automation, Vol.9, No.5, pp. 624-637, 1993.
- [81] N. Chopra, M. W. Spong, R. Ortega, and N. E. Barabanov, “On Tracking Performance in Bilateral Teleoperation,” IEEE Trans. on Robotics, Vol.22, No.4, pp. 861-866, 2006.
- [82] R. Cortesao, J. Park, and O. Khatib, “Real-Time Adaptive Control for Haptic Telemanipulation with Kalman Active Observers,” IEEE Trans. on Robotics, Vol.22, No.5, pp. 987-999, 2006.
- [83] D. Lee and P. Y. Li, “Passive Bilateral Control and Tool Dynamics Rendering for Nonlinear Mechanical Teleoperators,” IEEE Trans. on Robotics, Vol.21, No.5, pp. 936-951, 2005.
- [84] S. Tachi, K. Komoriya, K. Sawada, T. Nishiyama, T. Itoko, M. Kobayashi, and K. Inoue, “Telexistence Cockpit for Humanoid Robot Control,” J. of Advanced Robotics, Vol.17, No.3, pp. 199-217, 2003.
- [85] T. Mouri, H. Kawasaki, and K. Umebayashi, “Developments of New Anthropomorphic Robot Hand and its Master Slave System,” Proc. of IROS 2005, pp. 3474-3479, 2005.
- [86] M. Bouzit, G. Burdea, G. Popescu, and R. Boian, “The Rutgers Masster II – New Design Force-Feedback Glove,” IEEE/ASME Trans. Mechatron., Vol.7, No.2, pp. 256-263, 2002.
- [87] F. Kobayashi, G. Ikai, W. Fukui, and F. Kojima, “Two-Fingered Haptic Device for Robot Hand Tele-Operation,” J. of Robotics, Vol.2011, Article ID 419465, 2011.
- [88] T. Mouri, S. Ueki, and H. Kawasaki, “Bilateral Tele-operated Hand Robot with Communicational Time Delay?,” Proc. of IFAC 2017 World Congress, pp. 13260-13265, 2017.
- [89] S. Ueki, T. Mouri, T. Endo, and H. Kawasaki, “Study on stiffness visualization and safety control based on will-consensus building for tele-palpation robot system,” Artificial Life and Robotics, Vol.21, Issue 1, pp. 31-36, 2016.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.