Paper:
Adaptive Generalized Predictive Controller and Cartesian Force Control for Robot Arm Using Dynamics and Geometric Identification
Shohei Hagane*1, Liz Katherine Rincon Ardila*1, Takuma Katsumata*2, Vincent Bonnet*3, Philippe Fraisse*4, and Gentiane Venture*1
*1Tokyo University of Agriculture and Technology
2-24-16 Nakacho, Koganei City, Tokyo 184-8588, Japan
*2Yahoo Japan Corporation
Kioi Tower, Tokyo Garden Terrace Kioicho, 1-3 Kioicho, Chiyoda-ku, Tokyo 102-8282, Japan
*3Electrical Engineering and Robotics, University of Paris-Est Créteil
61 Avenue Général de Gaulle, 94000 Créteil, France
*4Université de Montpellier
LIRMM, 161 Rue ADA, 34095 Montpellier, France

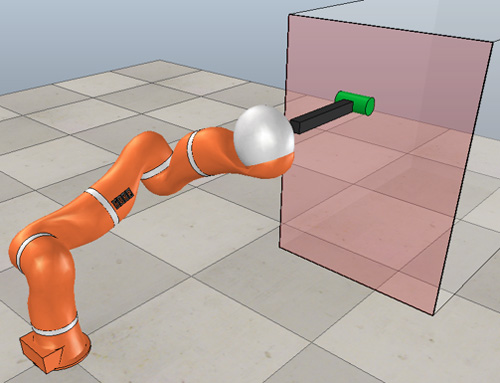
In realistic situations such as human-robot interactions or contact tasks, robots must have the capacity to adapt accordingly to their environment, other processes and systems. Adaptive model based controllers, that requires accurate dynamic and geometric robot’s information, can be used. Accurate estimations of the inertial and geometric parameters of the robot and end-effector are essential for the controller to demonstrate a high performance. However, the identification of these parameters can be time-consuming and complex. Thus, in this paper, a framework based on an adaptive predictive control scheme and a fast dynamic and geometric identification process is proposed. This approach was demonstrated using a KUKA lightweight robot (LWR) in the performance of a force-controlled wall-painting task. In this study, the performances of a generalized predictive control (GPC), adaptive proportional derivative gravity compensation, and adaptive GPC (AGPC) were compared. The results revealed that predictive controllers are more suitable than adaptive PD controllers with gravitational compensation, owing to the use of well-identified geometric and inertial parameters.
Adaptive generalized predictive controller
- [1] I. Iglesias, M. A. Sebastian, and J. E. Aresc, “Overview of the State of Robotic Machining: Current Situation and Future Potential,” Procedia Engineering, Vol.132, pp. 911-917, 2015.
- [2] T. Brogardh, “Identification and Control. Robot Control Overview: An Industrial Perspective,” Modeling, Identification and Control, Vol.30, No.3, pp. 167-180, 2009.
- [3] A. B. Moniz and B. J. Krings, “Robots Working with Humans or Humans Working with Robots? Searching for Social Dimensions in New Human-Robot Interaction in Industry,” Societies, Vol.6, No.3, 2016.
- [4] A. Albu-Schäffer, S. Haddadin, C. Ott, T. Wimbock, and G. Hirzinger, “The DLR Lightweight Robot: Design and Control Concepts for Robots in Human Environments,” Indusrial Robot: An International J., Vol.34, No.5, pp. 376-385, 2007.
- [5] M. H. Raibert and J. J. Craig, “Hybrid position/force control of manipulators,” J. of Dynamic Systems, Measurement, and Control, Vol.103, pp. 126-133, 1981.
- [6] A. Wahrburg, S. Zeiss, B. Matthias, and H. Ding, “Contact force estimation for robotic assembly using motor torques,” 2014 IEEE Int. Conf. on Automation Science and Engineering (CASE), pp. 1252-1257, 2014.
- [7] E. de Sol, R. King, R. Scott, and M. Ferre, “External force estimation for teleoperation based on proprioceptive sensors,” Int. J. of Advanced Robotic Systems, DOI: 10.5772/58468, 2014.
- [8] M. Linederoth, A. Stolt, A. Robertsson, and R. Johansson, “Robotic force estimation using motor torques and modeling of low velocity friction disturbances,” IEEE/RSJ Int. Conf. on Int. Robots and Systems, pp. 3550-3556, 2013.
- [9] K. S. Eom, I. H. Suh, W. K. Chung, and S. R. Oh, “Disturbance observer based force control of robot manipulator without force sensor,” IEEE Int. Conf. on Robot. Autom., pp. 3012-3017, 1998.
- [10] A. Alcocer, A. Robertsson, A. Valera, and R. Johansson, “Force estimation and control in robot manipulators,” IFAC Symp. on Robot Control, pp. 31-36, 2003.
- [11] Z. Liu, F. Yu, L. Zhang, and T. Li, “Real-Time Estimation of Sensor-Less Planar Robot Contact Information,” J. Robot. Mechatron., Vol.29, No.3, pp. 557-565, 2017.
- [12] Y. Fujimoto, S. Obata, and A. Kawamura, “Robust biped walking with active interaction control between foot and ground,” IEEE Int. Conf. on Robot. Autom., pp. 2030-2035, 1998.
- [13] M. Gautier and W. Khalil, “On the identification of inertial parameters of robots,” IEEE Int. Conf. on Decision Control, pp. 2264-2269, 1998.
- [14] W. Khalil and E. Dombre, “Identification of the dynamic parameters,” “Modeling, identification and control of robots,” 1st ed., Butterworth-Heinemann, pp. 291-311, 2002.
- [15] M. Gautier, “Numerical calculation of the base inertial parameters,” J. of Robotic Systems, Vol.8, pp. 485-506, 1991.
- [16] M. Gautier and G. Venture, “Identification of standard dynamic parameters of robots with positive definite inertia matrix,” IEEE/RSJ Int. Conf. on Int. Robots and Systems, pp. 5815-5820, 2013.
- [17] J. Swevers, C. Ganseman, D. B. Tukel, J. de Schutter, and H. Van Brussel, “Optimal robot excitation and identification,” IEEE Trans. on Robot. Autom., Vol.13, pp. 730-740, 1997.
- [18] G. Calafiore, M. Indri, and B. Bona, “Robot dynamic calibration: optimal excitation trajectories and experimental parameter estimation,” J. of Field Robotics, Vol.18, pp. 55-68, 2001.
- [19] W. Rackl, R. Lampariello, and G. Hirzinger, “Robot excitation trajectories for dynamic parameter estimation using optimized B-Splines,” IEEE Int. Conf. on Robot. Autom., pp. 2042-2047, 2012.
- [20] J. Jin and N. Gans, “Parameter identification for industrial robots with a fast and robust trajectory design approach,” Robotics and Computer-Integrated Manufacturing, Vol.31, pp. 21-29, 2015.
- [21] S. J. Qin and T. A. Badgwell, “A survey of industrial model predictive control technology,” Control Engineering Practice, Vol.11, No.7, pp. 733-764, 2003.
- [22] E. F. Camacho and C. Bordons, “Model Predictive Control,” Springer Science Business Media, 2013.
- [23] D. W. Clarke, C. Mohtadi, and P. S. Tuffs, “Generalized predictive control – Part I. The basic algorithm,” Automatica, Vol.23, No.2, pp. 137-160, 1987.
- [24] D. Clarke, “Application of generalized predictive control to industrial processes,” IEEE Control Systems Magazine, Vol.8, No.2, pp. 49-55, 1988.
- [25] L. K. Rincon, “Study of the dynamic behavior of CNC machine tool with emphases on the implementation of control systems,” Ph.D. thesis, UNICAMP, 2013.
- [26] S.A. Ajwad, J. Iqbal, M. I. Ullah, and A. Mehmood, “A systematic review of current and emergent manipulator control approaches,” Frontiers of Mechanical Engineering, Vol.10, No.2, pp. 198-210, 2015.
- [27] J. M. Maciejowski, “Predictive Control with Constraints,” Prentice Hall, 2000.
- [28] M. Makarov et al, “Generalized predictive control of an anthropomorphic robot arm for trajectory tracking,” 2011 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics (AIM), 2011.
- [29] A. P. Aguiar, J. P. Hespanha, and P. V. Kokotovic, “Performance limitations in reference tracking and path following for nonlinear systems,” Automatica, Vol.44, No.3, pp. 598-610, 2008.
- [30] K. Holkar and L. Waghmare, “An overview of model predictive control,” Int. J. of Control and Automation, Vol.3, No.4, pp. 47-63, 2010.
- [31] K. J. Latawiec, “Extended horizon adaptive model algorithmic control,” IFAC Proc. Vol.30, No.11, pp. 305-310, 1997.
- [32] A.-L. Elshafei, G. A. Dumont, and A. Elnaggar, “Adaptive GPC based on Laguerre-filters modelling,” Automatica, Vol.30, No.12, pp. 1913-1920, 1994.
- [33] T. Henmi, “Control Parameters Tuning Method of Nonlinear Model Predictive Controller Based on Quantitatively Analyzing,” J. Robot. Mechatron., Vol.28, No.5, pp. 695-701, 2016.
- [34] T. Katsumata, B. Navaro, V. Bonnet, P. Fraisse, A. Crosnier, and G. Venture, “Optimal exciting motion for fast robot identification. Application to contact painting tasks with estimated external forces,” Robotics and Autonomous System (in press).
- [35] D. Tolani, A. Goswami, and N. Badler, “Real-time inverse kinematics techniques for anthropomorphic limbs,” Graphical Models, Vol.62, pp. 353-388, 2000.
- [36] W. Khalil and D. Creusot, “SYMORO+ : A system for the symbolic modeling of robots,” Cambridge J. of Robotica, Vol.15, pp. 153-161, 1997.
- [37] M. Gautier and S. Briot, “New Method for Global Identification of the Joint Drive Gains of Robots using a Known Payload Mass,” Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2011), San Francisco, CA, USA, September 25-30, 2011.
- [38] W. Khalil, M. Gautier, and P. Lemoine, “Identification of the payload inertial parameters of industrial manipulators,” IEEE Int. Conf. on Robot. Autom., pp. 4943-4948, 2007.
- [39] T. Katsumata and G. Venture, “Adaptive Cartesian force control using payload dynamics and geometric identification,” Tokyo University of Agriculture and Technology, Master thesis, pp. 43-51, 2017 (in Japanese).
- [40] K. J. Park, “Fourier-based optimal excitation trajectories for the dynamic identification of robots,” Cambridge J. of Robotica, Vol.24, pp. 625-633, 2006.
- [41] J. de Schutter and H. V. Brussel, “Compliant robot motion II. A control approach based on external control loops,” Int. J. of Robotics Research, Vol.7, pp. 18-33, 1988.
- [42] A. De Luca, B. Siciliano, and L. Zollo, “PD control with on-line gravity compensation for robots with elastic joints: Theory and experiments,” Automatica, Vol.41, No.10, pp. 1809-1819, 2005.
- [43] J. J. E. Slotine and W. Li, “Applied nonlinear control,” Prentice Hall, 1991.
- [44] W. Khalil and E. Dombre, “Modeling, Identification and Control of Robots,” Butterworth-Heinemann, 2004.
- [45] S. Masuda, T. Yamamoto, and M. Ooshima, “Model Predictive Control-III: Generalized Predictive Control (GPC) and the Relevant Topics,” Systems, Control and Information, Vol.46, No.9, pp. 578-584, 2002 (in Japanese).
- [46] I. Landau, “The RST digital controller design and applications,” Control Engineering Practice, Vol.6, No.2, pp. 155-165, 1998.
- [47] C. Decker et al., “Application of constrained receding horizon predictive control to a benchmark problem,” European J. of Control, Vol.1, No.2, pp. 157-165, 1995.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.