Paper:
Non-Energized Above Knee Prosthesis Enabling Stairs Ascending and Descending with Hydraulic Flow Controller
Takayuki Kikuchi*, Ryota Fujino**, Kenta Igarashi*, and Koichi Koganezawa*
*Tokai University
4-1-1 Kitakaname, Hiratsuka, Kanagawa 259-1292, Japan
**MHPS Engineering Co., Ltd.
12 Nishiki-cho, Naka-ku, Yokohama, Kanagawa 231-8715, Japan

This paper deals with an above-knee prosthesis (AKP) that allows stair ascending/descending with no external energy source. It controls the passive resistance and interlocking strength of the knee and ankle joints with a flow control valve (FCV) equipped with a hydraulic system. The FCV is also mechanically controlled by an automatic flow controller (AFC). Our previous study certified that the experimental AKP allows step-over-step gait in stair ascending and a slight knee flexion at the initial stage of the stance phase in level ground walking, as observed from non-amputees’ walking. However, the experiments showed that the AKP does not allow smooth flexing of the knee in the stance phase during stairs descending because of the improper timing of the AFC opening. This paper shows the total walking performance of the AKP equipped with a refined AFC.
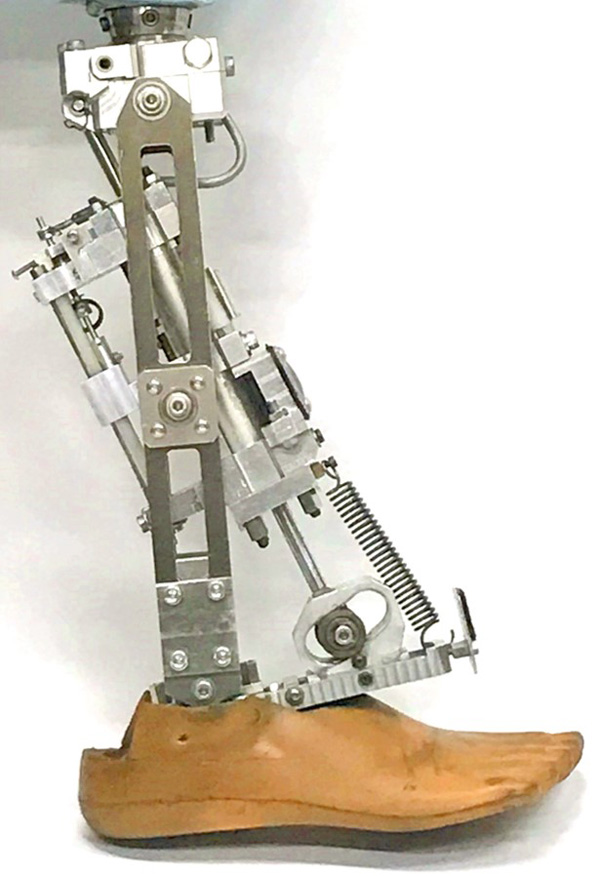
Non-energized above knee prosthesis
- [1] Ministry of Health, Labor and Welfare, “Survey on persons with physical disability (Periodical style),” pp. 4-8, 2006 (in Japanese).
- [2] K. Ziegler-Graham, E. J. MacKenzie, P. L. Ephraim, T. G. Travison, and R. Brookmeyer, “Estimating the prevalence of limb loss in the United States: 2005 to 2050,” Archives of Physical Medicine and Rehabilitation, Vol.89, No.3, pp. 422-429, 2008.
- [3] P. Jacquelin and J. M. Burnfield, “Gait analysis: Normal and pathological function second edition (Book style),” SLACK Incorporated, pp. 40-41, 2010.
- [4] S. Sekikawa and S. Morimoto, “The study of the effect of louncing action of prosthetic knee joint during stance phase,” The Japanese Society of Prosthetics and Orthotics (JSPO), Vol.15, No.2, pp. 156-162, 1999 (in Japanese).
- [5] M. Ninomiya, “A knee joint to allow trans-femoral prosthesis users to ascend and descend stairs or slopes,” 18th the Japanese Society of Prosthetics and Orthotics (JSPO) Seminar, pp. 15-21, 2002 (in Japanese).
- [6] M. J. Highsmith, J. T. Kahle, D. J. Lura, A. L. Lewandowski, W. S. Quillen, and S.-H. Kim, “Stair ascent and ramp gait training with the Genium knee,” Technology and Innovation, Vol.15, No.4, pp. 349-358, 2014.
- [7] E. J. Wolf, V. Q. Everding, A. L. Linberg, B. L. Schnall, J. M. Czerniecki, and J. M. Gambel, “Assessment of transfemoral amputees using C-Leg and Power Knee for ascending and descending inclines and steps,” J. of Rehabilitation Research and Development (JRRD), Vol.49, No.6, pp. 831-842, 2012.
- [8] M. Ninomiya, K. Masuda, Y. Hara, and M. Gotou, “Development of trance-femoral prosthesis knee joint,” The Japanese Society of Prosthetics and Orthotics (JSPO),” Vol.31, No.2, pp. 101-107, 2015 (in Japanese).
- [9] H. Fujimoto, H. Takita, M. Arita, K. Koganezawa, and I. Kato, “A/K prosthesis for ascending and descending stairs,” Biomechanism, Vol.9, pp. 241-251, 1988 (in Japanese).
- [10] H. Fujimoto, Y. Shimura, and I. Kato, “Analysis of Axial Force and Moment on Above-Knee Prosthesis Socket – Application of Control Signal to A/K Prosthesis –,” J. Robot. Mechatron., Vol.4, No.4, pp. 268-272, 1992.
- [11] K. Inoue, A. Pripunnochai, and T. Wada, “A control method for trans-femoral prosthetic knees in level walking and stair ascending based on thigh angular motion,” 38th Annual Int. Conf. of the IEEE Engineering in Medicine and Biology Society (EMBC), pp. 4638-4641, 2016.
- [12] K. Inoue, T. Tanaka, T. Wada, and S. Tachiwana, “Development of a passive knee mechanism that realizes level walk and stair ascent functions for transfemoral prosthesis,” 6th IEEE Int. Conf. on Biomedical Robotics and Biomechatronics (BioRob), pp. 522-527, 2016 (in Japanese).
- [13] S. Blumentritt, H. W. Scherer, U. Wellershaus, and J. W. Michael, “Design principles Biomechanical data and clinical experience with a polycentric knee offering controlled stance phase knee flexion: A preliminary report,” J. of Prosthetics and Orthotics, Vol.9, No.1, pp. 18-24, 1997.
- [14] J. Kawamura, H. Tanaka, K. Hayashi, K. Kawamura, Y. Matsuda, and K. Hasada, “Adjusting technique of knee mechanism of above-knee prosthesis for preventing knee-collapse 3.2 3R15 and TK-2000,” The Japanese Society of Prosthetics and Orthotics (JSPO), Vol.16, No.4, pp. 240-243, 2000 (in Japanese).
- [15] M. Suzuki, “Prosthetic knee joint Multiple linkage type safety knee joint – 5-linkage mechanism, Prevention for falling and knee buckling –,” The Robotics Society of Japan (RSJ), Vol.26, No.3, pp. 251-254, 2008 (in Japanese).
- [16] K. Fujiwara, Y. Kodama, S. Fujisawa, K. Nakatani, and A. Sakata, “The features on Nabtesco prosthetic knee joints,” The Japanese Society of Prosthetics and Orthotics (JSPO), Vol.28, No.4, pp. 209-212, 2012 (in Japanese).
- [17] R. Fujino, T. Kikuchi, and K. Koganezawa, “Above knee prosthesis for ascending/descending stairs with no external energy source,” 26th IEEE Int. Symp. on robot and human interactive communication (RO-MAN), pp. 1096-1101, 2017.
- [18] A. Sapin, E. H. Goujon, F. Almeida, P. Fodé, and F. Lavaste, “Functional gait analysis of transfemoral amputees using Hydracadence® knee joints compared with other single axis prosthetic knees with hydraulic swing phase control,” 9th Symp. on 3D Analysis of Human Movement, Valenciennes, 2006.
- [19] T. Kikuchi, R. Fujino, K. Igarashi, and K. Koganezawa, “Above knee prosthesis for ascending/descending stairs with no external energy source,” 18th Meeting of the Institute of Mechanical and Automatic Control Systems Integration Department Meeting (SI), pp. 2392-2397, 2017 (in Japanese).
- [20] A. L. Bell, D. R. Pederson, and R. A. Brand, “Prediction of hip joint center location from external landmarks,” Human Movement Science, Vol.8, Issue 1, pp. 3-16, 1989.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.