Paper:
Development of Gripper to Achieve Envelope Grasping with Underactuated Mechanism Using Differential Gear
Takumi Tamamoto*, Keita Takeuchi**, and Koichi Koganezawa**
*Department of Intelligent Robotics, Toyama Prefectural University
5180 Kurokawa, Imizu-shi, Toyama 939-0398, Japan
**Department of Mechanical Engineering, Tokai University
4-1-1 Kitakaname, Hiratsuka-shi, Kanagawa 259-1292, Japan

In a previous study, we developed a seven-axis multi-joint gripper (MJG) with a mechanism for varying the joint stiffness and showed that it was capable of dexterous grasping. In this research, we expand this design by introducing a hand with several multi-jointed fingers. The mechanism of grasping with this hand involves the use of serially connected differential gear systems (DGSs). The DGSs are controlled by only two actuators: one for driving the joints simultaneously and the other for adjusting the stiffness of all of the joints. The hand is shown to successfully grasp and envelope objects of some shapes without sensory feedback and handle objects by pinching them with the finger tips and subsequently transitioning to an envelope grasp. The mechanism that significantly contributes to this result is the tip roller attached to the fingertip. It is incorporated into the joint drive mechanism using a DGS. These functionalities are considerably advantageous in scenarios where information about the objects to be grasped, such as the shape and precise position, cannot be obtained.
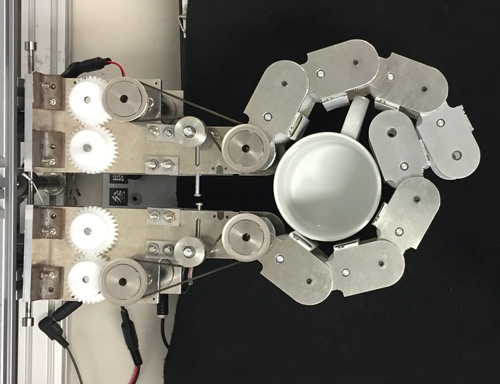
Envelope grasping by multi joint gripper
- [1] T. Tamamoto, K. Sayama, and K. Koganezawa, “Multi-Joint Gripper with Differential Gear System,” Proc. of the IEEE Int. Conf. on Intelligent Robots and Systems, pp. 15-20, 2014.
- [2] K. Sayama, T. Tamamoto, and K. Koganezawa, “Multi-Joint Gripper – Control of Envelope Gripping –,” Proc. of the IEEE Int. Conf. on Advanced Intelligent Mechatronics, pp. 336-341, 2015.
- [3] S. Hirose and Y. Umetani, “The Development of Soft Gripper for the Versatile Robot Hand,” Mechanism and Machine Theory, Vol.13, No.3, pp. 351-359, 1978.
- [4] N. Dechev, W. L. Clegjhorn, and S. Naumann, “Multiple Finger, Passive Adaptive Grasp Prosthesis Hand,” Mechanism Machine Theory, Vol.36, No.10, pp. 1157-1173, 2001.
- [5] B. Massa, S. Roccella, M. C. Carrozza, and P. Dario, “Design and Development of an Underactuated Prosthetic Hand,” Proc. of the 2002 IEEE Int. Conf. on Robotics and Autom., pp. 3374-3379, 2002.
- [6] N. Yamano, S. Takamuku, and K. Hosoda, “Development of Underactuated Humanoid Robot Hand for Adaptable Grasp,” Proc. of the 2008 JSME Conf. on Robotics and Mechatronics, pp. _1A1-A11_1-_1A1-A11_4, 2008.
- [7] M. Wassink, R. Carloni, and S. Stramigioli, “Port-Hamiltonian Analysis of a Novel Robotic Finger Concept for Minimal Actuation Variable Impedance Grasping,” IEEE Int. Conf. on Robotics and Automation, pp. 771-776, 2010.
- [8] K. Koganezawa, “A Mechanical Musculo-Skeletal System for a Human-Shaped Robot Arm,” Actuators, Vol.3, Issue 2, pp. 124-141, 2014.
- [9] R. Schiavi, G. Grioli, S. Sen, and A. Bicchi, “VSA-II: a Novel Prototype of Variable Stiffness Actuator for Safe and Performing Robots Interacting with Humans,” Proc. of the IEEE Int. Conf. on Robotics and Automation, pp. 2171-2176, 2008.
- [10] S. Wolf and G. Hirzinger, “A New Variable Stiffness Design: Matching Requirements of the Next Robot Generation,” Proc. of the IEEE Int. Conf. on Robotics and Automation, pp. 1741-1746, 2008.
- [11] Y. Hayashibara, “Study on a Variable Stiffness Mechanism Using Wire Spring,” J. Robot. Mechatron., Vol.20, No.2, pp. 296-301, 2008.
- [12] K. Telegenov, Y. Tlegenov, S. Hussain, and A. Shintemirov, “Preliminary Design of a Three-Finger Underactuated Adaptive End Effector with a Breakaway Clutch Mechanism,” J. Robot. Mechatron., Vol.27, No.5, pp. 496-503, 2015.
- [13] S. Takamuku, A. Fukuda, and K. Hosoda, “Repetitive grasping with anthropomorphic skin-covered hand enables robust haptic recognition,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 3212-3217, 2008.
- [14] Y. Sato and K. Koganezawa, “Five Finger Robot Hand with a Planetary Gear System,” Proc. of the 8th Asian Conf. on Multibody Dynamics, p. 38_1289936, 2016.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.