Paper:
Proposal of the Tire Longitudinal Characteristics Real-Time Estimation Method
Yuuki Shiozawa, Shunsuke Tsukuda, and Hiroshi Mouri
Department of Mechanical Systems Engineering, Tokyo University of Agriculture and Technology
2-24-16 Naka-cho, Kognei-shi, Tokyo 184-8588, Japan

For vehicle dynamics control and Autonomous Driving (AD) system, it is important to know the friction coefficient μ of the road surface accurately. It is because the lateral and the longitudinal force characteristics of the tire depend on the road surface condition largely. However, currently, it is difficult to detect tire performance degradation before the deterioration of vehicle dynamics in real time because tire force estimation is usually conducted by comparing the observed vehicle motion with the onboard reference vehicle-model motion. Such conventional estimators do not perform well if there is a significant difference between the vehicle and the model behavior. In this paper, a new tire state estimation method based on this tire longitudinal characteristic is proposed. In addition, the estimator for tire-road surface friction coefficient μ is proposed by using this geometric relationship. Using this method, the friction coefficient value for a real road can be determined from relatively simple calculations. Also, the advantage of this method is that it can be estimated in a small slip region before the tire loses its grip. In addition, this paper explain how to apply and the effect on the actual vehicle.
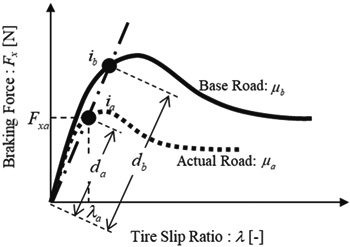
The tire-road friction coefficient estimator
- [1] T. Ito et al., “HMI Required Take-Over from Automated to Manual Driving,” Society of Automotive Engineers of Japan, Pre-Printing Presentation of the Spring Conf. in 2016, pp. 102-107, 2016.
- [2] T. Ito et al., “Effect of Take-Over Request Timing from Automated to Manual Driving,” Society of Automotive Engineers of Japan, Pre-Printing Presentation of the Spring Conf. in 2017, pp. 2720-2723, 2017.
- [3] R. Homma et al., “Basic Study on Transition to Manual from Highly Automated Driving automated driving’s authority transfer system basic examination (Second report),” Society of Automotive Engineers of Japan, Pre-Printing Presentation of the Spring Conf. in 2016, pp. 84-89, 2016.
- [4] R. Honma et al., “Basic Study on Transition to Manual from Highly Automated Driving Basic Study on Transition to Manual from Highly Automated Driving (Third report),” Society of Automotive Engineers of Japan, Pre-Printing Presentation of the Autumn Conf. 2016, pp. 483-488, 2016.
- [5] K. Toyoda et al., “Redundancy Concept for Automated Driving,” Society of Automotive Engineers of Japan, Pre-Printing Presentation of the Spring Conf. 2016, pp. 115-117, 2016.
- [6] Nippon ABS Ltd., “Anti-lock braking system,” Sankaido, p. 190, 1993.
- [7] A. Yokoyama et al., “Preventing Control of Excessive Slip during Regenerative Braking,” Proc. of Society of Automotive Engineers of Japan, October 2013, No.139-13, pp. 1-7, 2013.
- [8] Y. Tsuruoka, “Basic Study on Traction Control of Electric Vehicle,” Trans. of The Institute of Electrical Engineers D, Vol.118, No.1, pp. 45-50, 1998.
- [9] T. Okano et al., “Experimental Studies of Novel Cooperative Control System Hydraulic Brake and Electric Motor in Hybrid Electric Vehicle,” Trans. of the Annual Meeting of the Institute of Electrical Engineers of Japan Industry Application 2001, Vol.3, pp. 1441-1444, 2001.
- [10] S. Monzaki et al., “Improvement of active safety performance of electronic stability control,” TOYOTA Technical Review, Vol.56, No.2, pp. 44-50, 2009.
- [11] D. Iwama et al., “Measurement of Surface Roughness of Icy Road Surface by Spectral Polarimetry,” Proc. of Society of Automotive Engineers of Japan, May 2015, No.S188, pp. 987-992, 2015.
- [12] M. Kiriishi et al., “A Study on Winter Road Surface Evaluation Method,” The 25th Cold Region Technology Symp. Trans., pp. 225-260, 2009.
- [13] S. Sakai et al., “Novel Wheel Skid Detection Method without Chasis Velocity for Electric Vehicle,” Proc. of Society of Automotive Engineers of Japan, May, 1999 No.22-99, No.99, pp. 1-4, 1999.
- [14] K. Seto et al., “Application Traction Control for an Electric Driving Vehicle,” Trans. of The Japan Society of Mechanical Engineers, No.994-2, pp. 3_23-24, 1999.
- [15] K. Kouno et al., “Study on sensing of road surface condition by Quasi-Electrostatic Field technology,” Proc. of the 25th IAVSD, Vol.1, pp. 265-270, 2017.
- [16] D. Foito, M. Guerreiro, and A. Cordeiro, “Anti-slip wheel controller drive for EV using speed and torque observers,” Proc. of the 18th Int. Conf. on Electrical Machines, pp. 1-5, 2008.
- [17] D. Yin, S. Oh, and Y. Hori, “A novel traction control for EV based on maximum transmissible torque estimation,” IEEE Trans. on Industrial Electronics, Vol.56, No.6, pp. 2086-2094, 2009.
- [18] Y. Ge and C. S. Chang, “Torque distribution control for electric vehicle based on traction force observer,” Proc. of the IEEE Int. Conf. on Computer Science and Automation Engineering, pp. 371-375, 2011.
- [19] Y. Shiozawa et al., “Development of a Road Surface Friction Estimation for Actual Road,” The 24th Int. Symp. on Dynamics of Vehicles on Roads and Tracks, No.38-1, pp. 1-10, 2015.
- [20] Y. Shiozawa and H. Mouri, “Tire Characteristics Estimation Method Independent of Road Surface Conditions,” J. Robot. Mechatron., Vol.30, No.1, pp. 138-144, 2018.
- [21] Y. Shiozawa et al., “Device and method for estimating frictional condition of ground surface with which vehicle is in contact,” Patent No.5287717 (Application 2008.4.16).
- [22] M. Abe, “Vehicle Handling Dynamics,” Second Edition: Theory and Application, Butterworth-Heinemann, 2015.
- [23] H. B. Pecejka, “The Magic Formula Tire Model,” Proc. of the 1st Int. Colloquium on Tire Models for Vehicle Dynamics Analysis Held in Delft, 1991.
- [24] W. F. Milliken and D. L. Milliken, “Race Car Vehicle Dynamics,” Society of Automotive Engineers, pp. 473-487, 1997.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.