Paper:
Posture Control of Two Link Torque Unit Manipulator Considering Influence of Viscous Friction on Joints
Yasuyuki Setoyama*1, Ryota Hayashi*2, Yong Yu*3, Tetsuya Kinugasa*2, Koji Yoshida*2, and Koichi Osuka*4
*1Department of Electronic Control Engineering, Kagoshima National College of Technology
1460-1 Shinko, Hayato-cho, Kirishima 899-5193, Japan
*2Faculty of Engineering, Okayama University of Science
1-1 Ridai-cho, Kita-ku, Okayama-shi, Okayama 700-0005, Japan
*3Graduate School of Science and Engineering, Kagoshima University
1-21-40 Koorimoto, Kagoshima-shi, Kagoshima 890-0065, Japan
*4Graduate School of Engineering, Osaka University
2-1 Yamadaoka, Suita-shi, Osaka 565-0871, Japan

In this research, we consider a posture control problem of a planar two-link torque unit manipulator under a viscous friction condition. The torque unit is a module that consists of an electric motor and a reaction wheel. The friction caused by the presence of a viscous environment cannot be ignored in the real system. In this report, we first clarify the relation between the angle of links and the angular momentum of the reaction wheels under the viscous friction condition. Next, we try to control the first link at an arbitrary reference position without taking into consideration the angle of the second link. The angle of the first link can be controlled by changing the viscous friction condition between the first link and the base. Moreover, we attempt to control the second link at an arbitrary reference position by using the residual angular momentum of the reaction wheel at the second link. Finally, we demonstrate the feasibility of the proposed method by conducting a verification experiment.
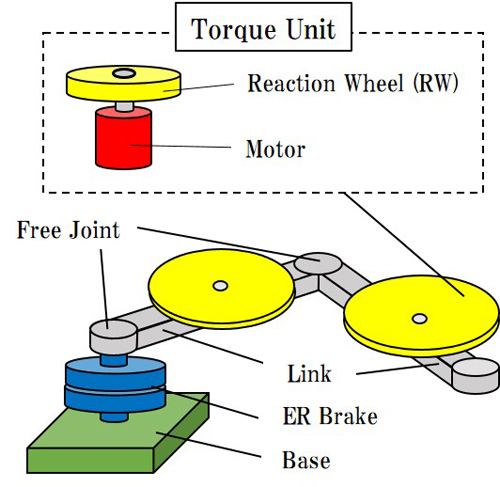
Two-link torque unit manipulator
- [1] K. Osuka, K. Yoshida, and T. Ono, “New Design Concept of Space Manipulator,” Proc. of the 33rd IEEE Conf. on Decision and Control, pp. 1823-1825, 1994.
- [2] K. Osuka, K. Yoshida, and T. Ono, “Proposal of Torque Unit Manipulator,” J. of the Robotics Society of Japan, Vol.14, No.7, pp. 1018-1025, 1996 (in Japanese).
- [3] M. L. Visinsky, J. R. Cavallaro, and I. D. Walker, “A dynamic fault tolerance framework for remote robots,” IEEE Trans. on Robotics and Automation, Vol.11, No.4, pp. 477-489, 1995.
- [4] M. M. W. Dixon, D. Dawson, and I. Walker, “Fault detection and identification for robot manipulators,” Proc. of 2004 IEEE Int. Conf. on Robotics and Automation, pp. 4981-4986, 2004.
- [5] A. De Luca and L. Ferrajoli, “A modified Newton-Euler method for dynamic computations in robot fault detection and control,” Proc. of 2009 IEEE Int. Conf. on Robotics and Automation, pp. 3359-3364, 2004.
- [6] H. Arai and S. Tachi, “Position Control of a Manipulator with Passive Joints Using Dynamic Coupling,” IEEE Trans. on Robotics and Automation, Vol.7, No.4, pp. 528-534, 1991.
- [7] T. Yoshikawa, K. Kobayashi, and T. Watanabe, “Design of a Desirable Trajectory and Convergent Control for 3-D.O.F Manipulator with a Nonholonomic Constraint,” Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), Vol.2, No.2000, pp. 2684-2689, 2000.
- [8] T. Suzuki and Y. Nakamura, “Control of Nonholonomic Free-Joint Manipulator with One Actuator,” IEEE/RSJ Int. Conf. on Inteligent Robots and Systems (IROS), pp. 127-132, 2001.
- [9] K. Osuka and T. Nohara, “Attitude Control of Torque Unit Manipulator Via Trajectory Planning – Treatment as A Nonholonomic System –,” J. of the Robotics Society of Japan, Vol.18, No.4, pp. 612-615, 2000 (in Japanese).
- [10] K. Yoshida and K. Osuka, “On Motion Trajectories for The Control of All State Variables For Torque-unit Manipulator,” J. of the Robotics Society of Japan, Vol.25, No.7, pp. 1108-1117, 2007 (in Japanese).
- [11] K. Yoshida, Y. Katayama, T. Kinugasa, K. Fukuda, and K. Osuka, “A Control Strategy for Torque-unit Manipulators,” Trans. of the Institute of Systems, Control and Information Engineers, Vol.26, No.2, pp. 74-83, 2013 (in Japanese).
- [12] J. Sahashi and T. Narikiyo, “Control of Underactuated Manipulator with Passive Velocity Field Control,” Trans. of the Society of Instrument and Control Engineers, Vol.40, No.10, pp. 1030-1037, 2004 (in Japanese).
- [13] T. Yoshikawa, K. Kobayashi, and T. Watanabe, “Design of a Desirable Trajectory and Convergent Control for 3-D.O.F Manipulator with a Nonholonomic Constraint,” J. of the Robotics Society of Japan, Vol.18, No.4, pp. 584-589, 2000 (in Japanese).
- [14] R. Hayashi, Y. Setoyama, Y. Yu, T. Kinugasa, K. Yoshida, and K. Osuka, “Study on Posture Control of A Rotating Link System with A Torque Unit under Frictional Condition,” Trans. of the Japan Society of Mechanical Engineers, Series C, Vol.79, No.808, pp. 4692-4704, 2013 (in Japanese).
- [15] Y. Setoyama, R. Hayashi, Y. Yu, T. Kinugasa, K. Yoshida, and K. Osuka, “Posture Control of One-link Torque Unit Manipulator under Friction Condition – Relation between Angular Momentum of A Reaction Wheel and Friction Condition –,” Proc. of ISCIE/ASME 2014 Int. Symp. on Flexible Automation, pp. 1-8, 2014.
- [16] Y. Setoyama, R. Hayashi, Y. Yu, T. Kinugasa, K. Yoshida, and K. Osuka, “Posture Control of Two Link Torque Unit Manipulator under Condition of Viscous Friction,” Trans. of the Japan Society of Mechanical Engineers, Vol.81, No.827, pp. 1-14, doi: 10.1299/transjsme.15-00067, 2015 (in Japanese).
- [17] T. Nakamura, Y. Akamatsu, and Y. Kusaka, “Development of Soft Manipulator with Variable Rheological Joints and Pneumatic Sensor for Collision with Environment,” J. Robot. Mechatron., Vol.20, No.4, pp. 634-640, 2008.
- [18] A. Inoue, N. Kanno, M. Yoshikawa, and T. Nakamura, “Development of a manipulator with an opposed-placement-type ER clutch contributing to collision force reduction,” J. of Physics: Conf. Series, Vol.412, 012012, 2013.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.