Paper:
Error Analysis by Kinetics for Parallel-Wire Driven System Using Approximated Inverse Kinematics
Hitoshi Kino*, Takumi Imamura*, and Norimitsu Sakagami**
*Department of Intelligent Mechanical Engineering, Fukuoka Institute of Technology
3-30-1 Wajirohigashi, Higashi-ku, Fukuoka-shi, Fukuoka 811-0295, Japan
**Department of Navigation and Ocean Engineering, Tokai University
3-20-1 Orido, Shimizu-ku, Shizuoka-shi, Shizuoka 424-0902, Japan

Parallel-wire driven systems, which use light flexible wires in place of rigid links, control the position of a target object by controlling their wire lengths. In the kinematics for such a parallel-wire driven system, when the relationship between the end-effector position and the wire lengths is investigated, a fixed point for the wire-contacting point on the winding reel in the actuator (or guide pulley) is often approximated to simplify the calculation. The approximated kinematics however could lead to a number of positioning errors in the positioning control. This study proposes a framework for evaluating these positioning control errors by using approximated inverse kinematics. In view of the system dynamics, this study analyzes the positioning control errors for the control method in the wire-length coordinates. We discuss a case study on a two degrees-of-freedom planar system using three wires.
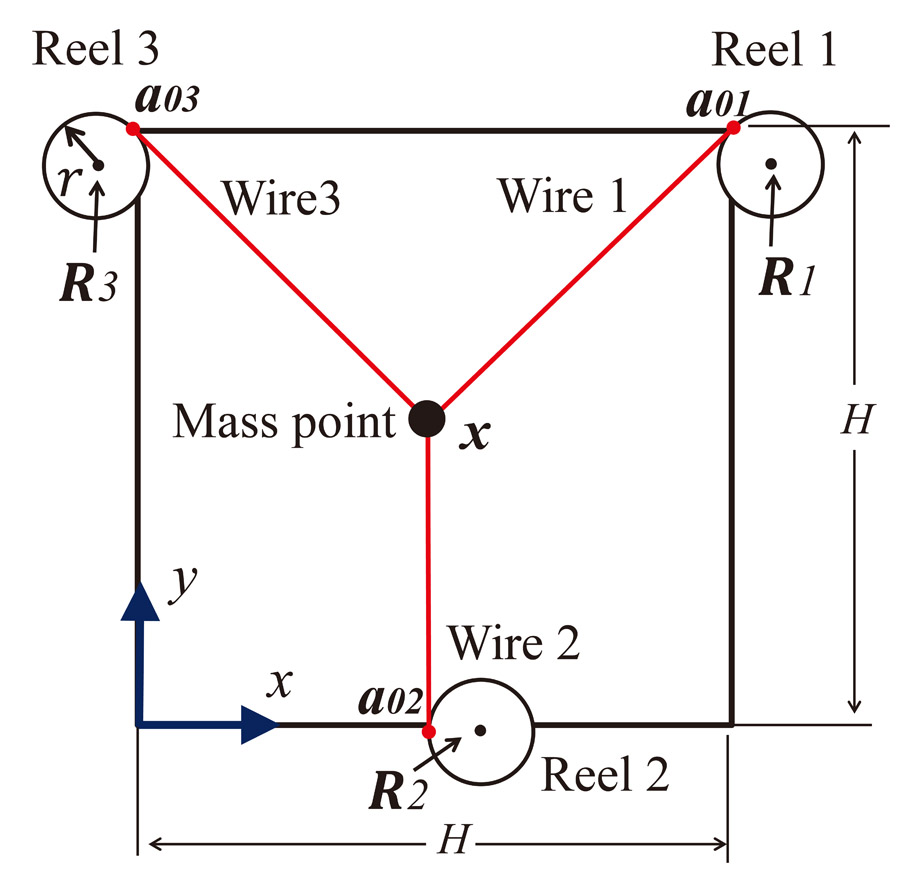
Case study using two-DOF planar system with three wires
- [1] H. Kino and S. Kawamura, “Mechanism and Control of Parallel-Wire Driven System,” J. Robot. Mechatron., Vol.27, No.6, pp. 599-607, 2015.
- [2] X. Tang, “An Overview of the Development for Cable-Driven Parallel Manipulator,” Advances in Mechanical Engineering, Vol.2014, pp. 1-9, 2014.
- [3] T. Bruckmann and A. Pott (Eds.), “Cable-Driven Parallel Robots (Mechanisms and Machine Science 12),” Springer, 2013.
- [4] A. Pott and T. Bruckmann (Eds.), “Cable-Driven Parallel Robots: Proceedings of the Second International Conference on Cable-Driven Parallel Robots (Mechanisms and Machine Science 32),” Springer, 2015.
- [5] M. Yamamoto, N. Yanai, and A. Mohri, “Trajectory Control of Incompletely Restrained Parallel-Wire-Suspended Mechanism Based on Inverse Dynamics,” Trans. Robotics, Vol.20, No.5, pp. 840-850, 2004.
- [6] J. Albus, R. Bostelman, and N. Dagalakis, “The nist robocrane,” J. Robotic Systems, Vol.10, No.5, pp. 709-724, 1993.
- [7] H. Osumi, T. Arai, and H. Asama, “Development of a Seven Degrees of Freedom Crane with Three Wires (1st Report) – Inverse Kinematics of the Crane –,” J. Japan Society for Precision Engineering, Vol.59, No.5, pp. 767-772, 1993 (in Japanese).
- [8] A. Ming and T. Higuchi, “Study on multiple degree-of-freedom positioning mechanism using wires (Part 1) – concept, design and control,” Int. J. Japan Social Engineering, Vol.28, No.2, pp. 131-138, 1994.
- [9] A. Ming and T. Higuchi, “Study on multiple degree-of-freedom positioning mechanism using wires (Part 2) – development of a planar completely restrained positioning mechanism,” Int. J. Japan Social Engineering, Vol.28, No.3, pp. 235-242, 1994.
- [10] R. Lindemann and D. Tesar, “Construction and Demonstration of a 9-String 6-DOF Force Reflecting Joystick for Telerobotics,” Proc. NASA Conf. Space Telerobotics, Vol.4, pp. 55-63, 1989.
- [11] Y. Hirata and M. Sato, “3-Dimensional Interface Device for Virtual Work Space,” Proc. Int. Conf. Intelligent Robots and Systems, Vol.2, pp. 889-896, 1992.
- [12] S. Kawamura and K. Itoh, “New Type Master Robot for Teleoperation Using A Radial Wire Drive System,” Proc. of Int. Conf. Intelligent Robots and Systems, Vol.1, pp. 55-60, 1993.
- [13] F. Takemura, M. Enomoto, K. Denou, K. Erbatur, U. Zwiers, and S. Tadokoro, “A human body searching strategy using a cable-driven robot with an electromagnetic wave direction finder at major disasters,” Advanced Robotics, Vol.19, No.3, pp. 331-347, 2005.
- [14] F. Takemura, M. Enomoto, T. Tanaka, K. Denou, Y. Kobayashi, and S. Tadokoro, “Development of the balloon-cable driven robot for information collection from sky and proposal of the search strategy at a major disaster,” Proc. Int. Conf. Advanced Intelligent Mechatronics, pp. 658-663, 2005.
- [15] K. Homma, O. Fukuda, J. Sugawara, Y. Nagata, and M. Usada, “A Wire-driven Leg Rehabilitation System: Development of a 4-DOF Experimental System,” Proc. Int. Conf. Advanced Intelligent Mechatronics, Vol.2, pp. 908-913, 2003.
- [16] G. Rosati, M. Andreolli, A. Biondi, and P. Gallina, “Performance of Cable Suspended Robots for upper Limb Rehabilitation,” Proc. Int. Conf. Rehabilitation Robotics, pp. 385-392, 2007.
- [17] Y. Li and Q. Xu, “Design and Development of a Medical Parallel Robot for Cardiopulmonary Resuscitation,” Trans. Mechatronics, Vol.12, No.3, pp. 265-273, 2007.
- [18] Y. Cheng, G. Ren, and S. Dai, “The multi-body system modelling of the Gough-Stewart platform for vibration control,” J. Sound and Vibration, Vol.271, pp. 559-614, 2004.
- [19] R. Yao, X. Tang, J. Wang, and P. Huang, “Dimensional optimization design of the four-cable-driven parallel manipulator in FAST,” Trans. Mechatronics, Vol.15, No.6, pp. 932-941, 2010.
- [20] K. Maeda, S. Tadokoro, T. Takamori, M. Hiller, and R. Verhoeven, “On design of a redundant wire-driven parallel robot WARP manipulator,” Proc. Int. Conf. Robotics and Automation, Vol.2, pp. 895-900, 1999.
- [21] S. Kawamura, H. Kino, and W. Choe, “High speed manipulation by using parallel wire driven robots,” ROBOTICA, Vol.18, Part 1, pp. 13-21, 2000.
- [22] P. H. Borgstrom, B. L. Jordan, B. J. Borgstrom, M. J. Stealey, G. S. Sukhatme, M. A. Batalin, and W. J. Kaiser, “NIMS-PL: A Cable-Driven Robot With Self-Calibration Capabilities,” Trans. Robotics, pp. 1005-1015, Vol.25, No.5, 2009.
- [23] P. Miermeister, A. Pott, and A. Verl, “Auto-Calibration Method for Overconstrained Cable-Driven Parallel Robots,” Proc. Int. Symp. Robotics, pp. 1-6, 2012.
- [24] H. Kino, T. Yahiro, F. Takemura, and T. Morizono, “Robust PD Control Using Adaptive Compensation For Completely Restrained Parallel-wire Driven Robots: Translational Systems Using the Minimum Number of Wires Under Zero-gravity Condition,” Trans. Robotics, Vol.23, No.4, pp. 803-812, 2007.
- [25] H. Kino, N. Okubo, T. Ikeda, and H. Ochi, “Error Evaluation Method of Approximated Inverse Kinematics for Parallel-wire Driven System: Basic study for three-wire planar system,” J. Robot. Mechatron., Vol.28, No.6, pp. 808-818, 2016.
- [26] H. Kino, T. Yahiro, S. Taniguchi, and K. Tahara, “Sensorless Position Control Using Feedforward Internal Force for Completely Restrained Parallel-wire Driven Systems,” Trans. Robotics, Vol.25, No.2, pp.467-474, 2009.
- [27] A. Alikhani and M. Vali, “Modeling and robust control of a new large scale suspended cable-driven robot under input constraint,” Proc. Int. Conf. Ubiquitous Robots and Ambient Intelligence, pp. 238-243, 2011.
- [28] T. Dallej, M. Gouttefarde, N. Andreff, M. Micael, and P. Martinet, “Towards vision-based control of cable-driven parallel robots,” Proc. Int. Conf. Intelligent Robots and Systems, pp. 2855-2860, 2011.
- [29] E. Laroche, R. Chellal, L. Cuvillon, and J. Gangloff, “A Preliminary Study for H∞ Control of Parallel Cable-Driven Manipulators,” T. Bruckmann and A. Pott (Eds.), “Cable-Driven Parallel Robots (Mechanisms and Machine Science 12),” pp. 353-369, Springer, 2013.
- [30] P. Miermeister, A. Pott, and A. Verl, “Dynamic Modeling and Hardware-In-The-Loop Simulation for the Cable-Driven Parallel Robot IPAnema,” Proc. Int. Symp. Robotics, pp. 1-8, 2010.
- [31] H. Kino, H. Ochi, Y. Matsutani, and K. Tahara, “Sensorless Point-to-point Control for a Musculoskeletal Tendon-driven Manipulator – Analysis of a Two-DOF Planar System with Six Tendons –,” Advanced Robotics, Vol.31, No.16, pp. 851-864, 2017.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.