Paper:
Refining Two Robots Task Execution Through Tuning Behavior Trajectory and Balancing the Communication
Jorge David Figueroa Heredia*, Shouhei Shirafuji**, Hamdi M. Sahloul*, Jose Ildefonso U. Rubrico**, Taiki Ogata**, Tatsunori Hara**, and Jun Ota**
*Department of Precision Engineering, School of Engineering, The University of Tokyo
5-1-5 Kashiwanoha, Kashiwa-shi, Chiba 277-8568, Japan
**Research into Artifacts, Center for Engineering (RACE), The University of Tokyo
5-1-5 Kashiwanoha, Kashiwa-shi, Chiba 277-8568, Japan

A method for modifying robot behaviors is introduced to improve robot performance during the execution of object manipulation tasks. The purpose of this method is to minimize the execution time of tasks and prevent collision with obstacles, including objects to be manipulated and the robot itself, by considering two approaches. The first is to use the potential that robots can provide, considering that the programs are based on events that are subject to the response of sensors. The second is to determine the maximum rate at which commands can be sent, without affecting the responses from the sensors, and, based on that, to accelerate or decelerate the execution of the task. The proposed method focuses on the refinement of two approaches: (a) modifying the trajectory of some behaviors, so that they are not executed step by step, but are executed in parallel, and (b) increasing the rate of sending robotic commands. To validate the proposed method, four real-world tasks are presented, including the flipping of a briefcase, the flipping of a weighing scale, the lifting of a weighing scale, and the opening of a folding chair, performed by a set of small robots. The reduction in execution time of the tasks varied between 54.2% and 73.6%; the implications of the improvement are discussed based on experimental results.
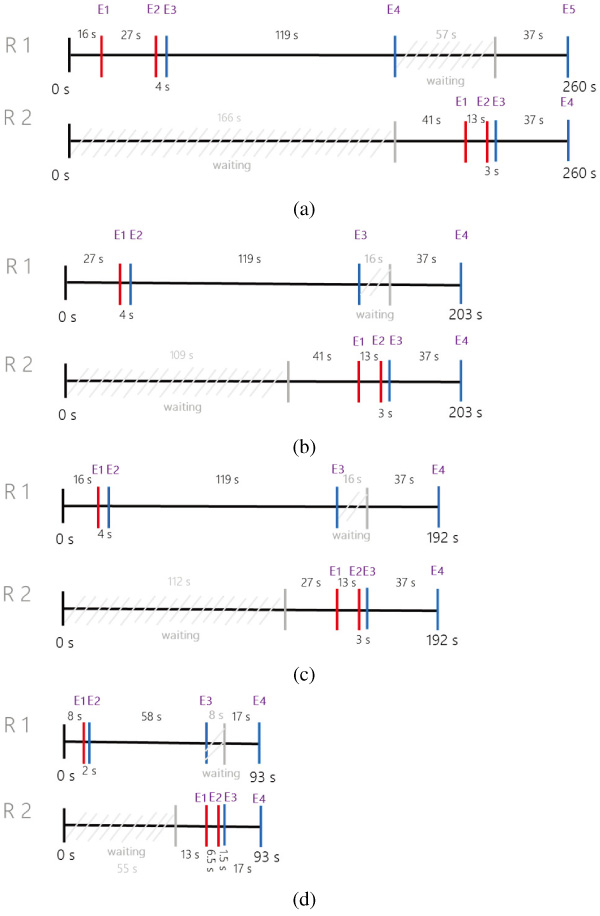
Proposed refinement process of the trajectories (from (a) to (d))
- [1] K. Yamazaki, T. Tsubouchi, and M. Tomono, “Furniture Model Creation through Direct Teaching to a Mobile Robot,” J. Robot. Mechatron., Vol.20, No.2, pp. 213-220, 2008.
- [2] M. H. Korayem and H. Ghariblu, “Analysis of Wheeled Mobile Flexible Manipulator Dynamic Motions with Maximum Load Carrying Capacities,” Robotics and Autonomous Systems, Vol.48, Nos.2-3, pp. 63-76.
- [3] M. H. Korayem, A. Heidari, and A. Nikoobin, “Maximum Allowable Dynamic Load of Flexible Mobile Manipulators using Finite Element Approach,” The Int. J. of Advanced Manufacturing Technology, Vol.36, No.9, pp. 1010-1021, 2008.
- [4] M. H. Korayem, A. Nikoobin, and V. Azimirad, “Maximum Load Carrying Capacity of Mobile Manipulators: Optimal Control Approach,” Robotica, Vol.27, No.1, pp. 147-159, 2009.
- [5] M. H. Korayem, V. Azimirad, and A. Nikoobin, “Maximum Load-Carrying Capacity of Autonomous Mobile Manipulator in an Environment with Obstacle Considering Tip Over Stability,” The Int. J. of Advanced Manufacturing Technology, Vol.46, No.5, pp. 811-829, 2010.
- [6] L. E. Parker, “ALLIANCE: An Architecture for Fault Tolerant Multirobot Cooperation,” IEEE Trans. on Robotics and Automation, Vol.14, No.2, pp. 220-240, 1998.
- [7] T. Sakuyama, J. D. Figueroa Heredia, T. Ogata, T. Hara, and J. Ota, “Object Transportation by Two Mobile Robots with Hand Carts,” Int. Scholarly Research Notices, Vol.2014, pp. 1-15, Article ID 684235, 2014.
- [8] Z. Liu, H. Kamogawa, and J. Ota, “Fast Grasping of Unknown Objects Through Automatic Determination of the Required Number of Mobile Robots,” Advanced Robotics, Vol.27, No.6, pp. 445-458, 2013.
- [9] J. D. Figueroa Heredia, J. Rubrico, S. Shirafuji, and J. Ota, “Teaching Tasks to Multiple Small Robots by Classifying and Splitting a Human Example,” J. Robot. Mechatron., Vol.29, No.2, pp. 419-433, 2017.
- [10] J. Hasegawa, K. Kurihara, and N. Nishiuchi, “Collision Free Path Planning Method for Mobile Robot,” Proc. 2002 IEEE Int. Conf. on Systems, Man and Cybernetics, Vol.3, pp. 6-9, 2002.
- [11] C. Mudgal and J. Vassileva, “An Influence Diagram Model for Multi-agent Negotiation,” Proc. 4th IEEE Int. Conf. on MultiAgent Systems, pp. 451-452, 2000.
- [12] W. Verdonck, “Experimental Robot Payload Identification with Application to Dynamic Trajectory Compensation,” Ph.D. Thesis, Katholieke University, 2004.
- [13] C. Mericli, M. Veloso, and H. L. Akin, “Task Refinement for Autonomous Robots using Complementary Corrective Human Feedback,” Int. J. of Advanced Robotic Systems, Vol.8, No.2, pp. 68-79, 2011.
- [14] S. LaValle and J. Kuffner, “Randomized Kinodynamic Planning,” Int. J. of Robotics Research, Vol.20, No.5, pp. 378-400, 2001.
- [15] L. E. Kavraki, P. Svestka, J.-C. Latombe, and M. H. Overmars, “Probabilistic roadmaps for path planning in high-dimensional configuration spaces,” IEEE Trans. on Robotics and Automation, Vol.12, No.4, pp. 566-580, 1996.
- [16] B. Burns, “Exploiting Structure: A Guided Approach to Sampling-Based Robot Motion Planning,” Ph.D. Thesis, University of Massachusetts, 2007.
- [17] R. Alterovitz, S. Patil, and A. Derbakova, “Rapidly-exploring Roadmaps: Weighing Exploration vs. Refinement in Optimal Motion Planning,” Proc. IEEE Int. Conf. on Robotics and Automation, pp. 3706-3712, 2011.
- [18] T. Kroger and F. M. Wahl, “Online Trajectory Generation: Basic Concepts for Instantaneous Reactions to Unforeseen Events,” IEEE Trans. on Robotics, Vol.26, No.1, pp. 94-111, 2010.
- [19] W. Khalil and E. Dombre, “Modeling, Identification & Control of Robots,” Kogan Page, 2004.
- [20] O. Dahl and L. Nielsen, “Torque-limited Path Following by Online Trajectory Time Scaling,” IEEE Trans. on Robotics and Automation, Vol.6, No.5, pp. 554-561, 1990.
- [21] R. H. Castain and R. P. Paul, “An On-Line Dynamic Trajectory Generator,” The Int. J. of Robotics Research, Vol.3, No.1, pp. 68-72, 1984.
- [22] S. Quinlan and O. Khatib, “Elastic Bands: Connecting Path Planning and Control,” Proc. IEEE Int. Conf. on Robotics and Automation, pp. 802-807, 1993.
- [23] M. Khatib, H. Jaouni, R. Chatila, and J. P. Laumond, “Dynamic Path Modification for Car-Like Nonholonomic Mobile Robots,” Proc. IEEE Int. Conf. on Robotics and Automation, pp. 2920-2925, 1997.
- [24] J. F. Canny, “The Complexity of Robot Motion Planning,” MIT Press, 1988.
- [25] P. A. O’Donnell and T. Lozano-Perez, “Deadlock-free and Collision-free Coordination of two Robot Manipulators,” Proc. IEEE Int. Conf. on Robotics and Automation, pp. 484-489, 1989.
- [26] K. G. Kant and S. W. Zucker, “Towards Efficient Trajectory Planning: Path Velocity Decomposition,” Int. J. of Robotics Research, Vol.5, No.3, pp. 72-89, 1986.
- [27] S. S. Chiddarwar and N. R. Babu, “Conflict Free Coordinated Path Planning for Multiple Robots using a Dynamic Path Modification Sequence,” Robotics and Autonomous Systems, Vol.59, Nos.7-8, pp. 508-518, 2011.
- [28] S. Koenig and M. Likhachev, “Incremental A*,” Advances in Neural Information Processing Systems, Vol.14, pp. 1539-1546, 2002.
- [29] P. Maes, “Situated Agents can have Goals,” Robotics and Autonomous Systems, Vol.6, Nos.1-2, pp. 49-70, 1990.
- [30] G. Demesure, M. Defoort, A. Bekrar, D. Trentesaux, and M. Djemaï, “Cooperation Mechanisms in Multi-agent Robotic Systems and Their Use in Distributed Manufacturing Control: Issues and literature review,” Proc. 40th Annual Conf. of the IEEE Industrial Electronics Society (IECON 2014), pp. 2538-2543, 2014.
- [31] J. Mankins, “Technology Readiness Levels – A White Paper,” Advanced Concepts Office, Office of Space Access and Technology, National Aeronautics and Space Administration (NASA), 1995.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.