Paper:
Creating a 3D Cuboid Map Using Multi-Layer 3D LIDAR with a Swing Mechanism
Yoshihiro Takita
Department of Computer Science, National Defense Academy of Japan
1-10-20 Hashirimizu, Yokosuka-City, Kanagawa 239-8686, Japan

This paper proposes a method for creating 3D occupancy grid maps using multi-layer 3D LIDAR and a swing mechanism termed Swing-LIDAR. The method using Swing-LIDAR can acquire 10 times more data at a stopping position than a method that does not use Swing-LIDAR. High-definition and accurate terrain information is obtained by a coordinate transformation of the acquired data compensated for by the measured orientation of the system. In this study, we develop a method to create 3D grid maps for autonomous robots using Swing-LIDAR. To validate the method, AR Skipper is run on the created maps that are used to obtain point cloud data without a swing mechanism, and 11 sets of each local map are combined. The experimental results exhibit the differences among the maps.
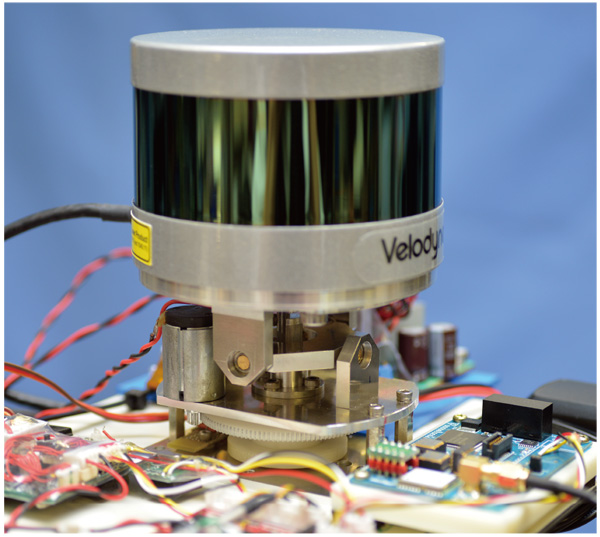
Swing-LIDAR
- [1] R. Triebel, P. Pfaff, and W. Burgard, “Multi-Level Surface maps for Outdoor Terrain Mapping and Loop Closing,” The Proc. of the 2006 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2276-2282, 2006.
- [2] J. L. Martínez, J. González, J. Morales, A. Mandow, and A. J. García-Cerezo, “Mobile robot motion estimation by 2D scan matching with genetic and iterative closest point algorithms,” J. of Field Robotics, Vol.23, No.1, pp. 21-34, 2006.
- [3] A. Desai and D. Huber, “Objective Evaluation of Scanning Lidar Configurations for Mobile Robots,” Proc. of the 2009 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2182-2189, 2009.
- [4] K. Yamauchi, N. Akai, R. Unai, K. Inoue, and K. Ozaki, “Person Detection Method Based on Color Layout in Real World Robot Challenge 2013,” J. Robot. Mechatron., Vol.26, No.2, pp. 151-157, 2014.
- [5] S. A. Rahok, H. Oneda, A. Tanaka, and K. Ozaki, “A Robust Navigation Method for Mobile Robots in Real-World Environment,” J. Robot. Mechatron., Vol.26, No.2, pp. 177-184, 2014.
- [6] T. Yoshida, K. Irie, E. Koyanagi, and M. Tomono, “An Outdoor Navigation Platform with a 3D Scanner and Gyro-assisted Odometry,” Trans. of the Society of Instrument and Control Engineers, Vol.47, No.10, pp. 493-500, 2011.
- [7] K. Kimoto, N. Asada, T. Mori, Y. Hara, A. Ohya, and S. Yuta, “Development of Small Size 3D LIDAR,” Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 4620-4626, 2014.
- [8] M. Saito, K. Kiuchi, S. Shogo, T. Yokota, Y. Fujino, T. Saito, and Y. Kuroda, “Pre-Driving Needless System for Autonomous Mobile Robots Navigation in Real World Robot Challenge 2013,” J. Robot. Mechatron., Vol.26, No.2, pp. 185-195, 2014.
- [9] K. Okawa, “Three Tiered Self-Localization of Two Position Estimation Using Three Dimensional Environment Map and Gyro-Odometry,” J. Robot. Mechatron., Vol.26, No.2, pp. 196-203, 2014.
- [10] T. Suzuki, M. Kitamura, Y. Amano, and N. Kubo, “Autonomous Navigation of a Mobile Robot Based on GNSS/DR Integration in Outdoor Environments,” J. Robot. Mechatron., Vol.26, No.2, pp. 214-224, 2014.
- [11] T. Shioya, K. Kogure, and N. Ohta, “Minimal Autonomous Mover – MG-11 for Tsukuba Challenge –,” J. Robot. Mechatron., Vol.26, No.2, pp. 225-235, 2014.
- [12] M. Yokozuka and O. Matsumoto, “A Reasonable Path Planning via Path Energy Minimization,” J. Robot. Mechatron., Vol.26, No.2, pp. 236-224, 2014.
- [13] Y. Takita and H. Date, “Actualized Autonomous Functions by Smart Dump 3,” J. of the Society Instrument and Control Engineers, Vol.49, No.9, pp. 636-636, 2010.
- [14] H. Date and Y. Takita, “Real World Experiments of Autonomous Mobile Robot Smart Dump – Influence and Countermeasure of Human Crowd Behavior in a Pedestrian Environment –,” J. of the Robotics Society of Japan, Vol.30, No.3, pp. 305-313, 2012.
- [15] O. Wulf and B. Wagner, “Fast 3D Scanning Methods for Laser Measurement Systems,” Proc. of 14th Int. Conf. on Control Systems and Computer Science (CSCS 14), pp. 312-317, 2003.
- [16] H. Surmann, A. Nüchter, and J. Hertzberg, “An autonomous mobile robot with a 3D laser range finder for 3D exploration and digitalization of indoor environments,” Robotics and Autonomous Systems, Vol.45, No.3, pp. 181-198, 2003.
- [17] H. Date, S. Ohkawa, Y. Takita, and J. Kikuchi, “High Precision Localization of Mobile Robot Using LIDAR Intensity of Surface,” Trans. of the Japan Society of Mechanical Engineers, Series C, Vol.79, No.806, pp. 3389-3398, 2013.
- [18] K. Ohno, T. Kawahara, and S. Tadokoro, “Development of 3D Laser Scanner for Measuring Uniform and Dense 3D Shapes of Static Objects in Dynamic Environment,” Proc. of ROBIO 2008, pp. 2161-2167, 2009.
- [19] M. Matsumoto, T. Yoshida, T. Mori, and S. Yuta, “3D SOKUIKI Sensor Module by Roundly Swinging Mechanism and SCIP 3D Command System,” Trans. of The Japan Society of Mechanical Engineers, Series C, Vol.75, No.760, pp. 186-195, 2007.
- [20] Y. Takita, “Generated Trajectory of Extended Lateral Guided Sensor Steering Mechanism for Steered Autonomous Vehicles in Real World Environments,” J. Robot. Mechatron., Vol.29, No.4, pp. 660-667, 2017.
- [21] Velodyne Inc., VLP-16 User Manual and Programming Guide 63-9243 Rev A.pdf, p. 45, 2015.
- [22] Y. Takita, S. Ohkawa, and H. Date, “Recognition Method Applied to Smart Dump 9 Using Multi-Beam 3D LiDAR for the Tsukuba Challenge,” J. Robot. Mechatron., Vol.27, No.4, pp. 451-460, 2016.
- [23] S. Ohkawa, Y. Takita, H. Date, and K. Kobayashi, “Development of Autonomous Mobile Robot Using Articulated Steering Vehicle and Lateral Guiding Method,” J. Robot. Mechatron., Vol.27, No.4, pp. 337-345, 2015.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.