Paper:
Development of an Accurate Video Shooting Method Using Multiple Drones Automatically Flying over Onuma Quasi-National Park
Sho Yamauchi*, Kouki Ogata**, Keiji Suzuki**, and Toshio Kawashima**
*Kitami Institute of Technology
165 Koencho, Kitami, Hokkaido 090-8507, Japan
**Future University Hakodate
116-2 Kamedanakano-cho, Hakodate, Hokkaido 041-8655, Japan

In recent years, promotional videos of mountains, seashores, and lakes have been created using drones. Shooting videos of natural landscapes with drones usually requires manual operation, and relies on the skill of the operator. However, if the intention is to shoot videos over a wide geographical area, manual operation is not sufficiently accurate. Therefore to accomplish this, and to take full advantage of the features of a drone, automatic operation is desirable. In this paper, we propose a method of safely modelling a video target and flight route. This includes planning for video shooting on the basis of a model, to realize accurate automatic video shooting of natural landscapes with drones. It was assumed that multiple drones would be operated simultaneously. Therefore, we developed an error verification method to compensate for performance differences between drones. To verify the usefulness of the method, it was used to shoot actual video images of Onuma quasi-national park in the south of Hokkaido Prefecture.
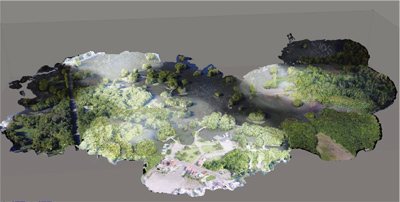
Created model for flight route planning
- [1] S. Siebert and J. Teizer, “Mobile 3D mapping for surveying earthwork projects using an Unmanned Aerial Vehicle (UAV) system,” Automation in Construction, Vol.41, pp. 1-14, 2014.
- [2] K. Schmid, H. Hirschmüller, A. Dömel, I. Grixa, M. Suppa, and G. Hirzinger, “View Planning for Multi-View Stereo 3D Reconstruction Using an Autonomous Multicopter,” J. of Intelligent & Robotic Systems, Vol.65, pp. 309-323, 2012.
- [3] C. Di Franco and G. Buttazzo, “Coverage Path Planning for UAVs Photogrammetry with Energy and Resolution Constraints,” J. of Intelligent & Robotic Systems, Vol.83, pp. 445-462, 2016.
- [4] I. Maza, K. Kondak, M. Bernard, and A. Ollero, “Multi-UAV Cooperation and Control for Load Transportation and Deployment,” J. of Intelligent & Robotic Systems, Vol.75, pp. 417-449, 2010.
- [5] M. W. Smith, J. L. Carrivick, and D. J. Quincey, “Structure from motion photogrammetry in physical geography,” Progress in Physical Geography, Vol.40, pp. 247-275, 2016.
- [6] M. J. Westoby, J. Brasington, N. F. Glasser, M. J. Hambrey, and J. M. Reynolds, “‘Structure-from-Motion’ photogrammertry: A low-cost, effective tool for geoscience applications,” Geomorphology, Vol.179, pp. 300-314, 2012.
- [7] A. Lucieer, S. M. Jong, and D. Turner, “Mapping landslide displacements using Structure from Motion (SfM) and image correlation of multi-temporal UAV photography,” Progress in Physical Geography, Vol.38, pp. 97-116, 2014.
- [8] F. Nex and F. Remondino, “UAV for 3D mapping applications: a review,” Applied Geomatics, Vol.6, pp. 1-15, 2014.
- [9] J. Liénard, A. Vogs, D. Gatziolis, and N. Strigul, “Embedded, real-time UAV control for improved, image-based 3D scene reconstruction,” Measurement, Vol.81, pp. 264-269, 2016.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.