Paper:
AR-Marker/IMU Hybrid Navigation System for Tether-Powered UAV
Hiroaki Nakanishi* and Hiroyuki Hashimoto**
*Graduate School of Engineering, Kyoto University
Kyotodaigaku-katsura, Nishikyo-ku, Kyoto 615-8540, Japan
**Mitsubishi Heavy Industries, Ltd.
2-16-5 Konan, Minato-ku, Tokyo 108-8215, Japan

Electrically powered unmanned aerial vehicles (UAV) are useful in performing inspection at various infrastructures or plants. A power supply through a tether cable is effective in extending flight time. During inspection activities, some or all satellites may be occluded. UAVs for inspection must be operated even in GPS-denied areas; therefore, a navigation system for GPS-denied areas is required. Depth information cannot be obtained correctly by a monocular camera. The ARToolkit, which is widely applied in augmented reality (AR), is not sufficient as a UAV navigation system. We have proposed a hybrid navigation method that integrates the ARToolkit and an inertial measurement unit (IMU). An analytic solution for both the worst and best estimation of yaw angle can be obtained by simple computation and helps remove outliers in measurements. From experimental results, it was proven that position estimation using the proposed method corresponded reasonably; however, it was necessary to correct the difference between the camera origin and the body’s center of gravity.
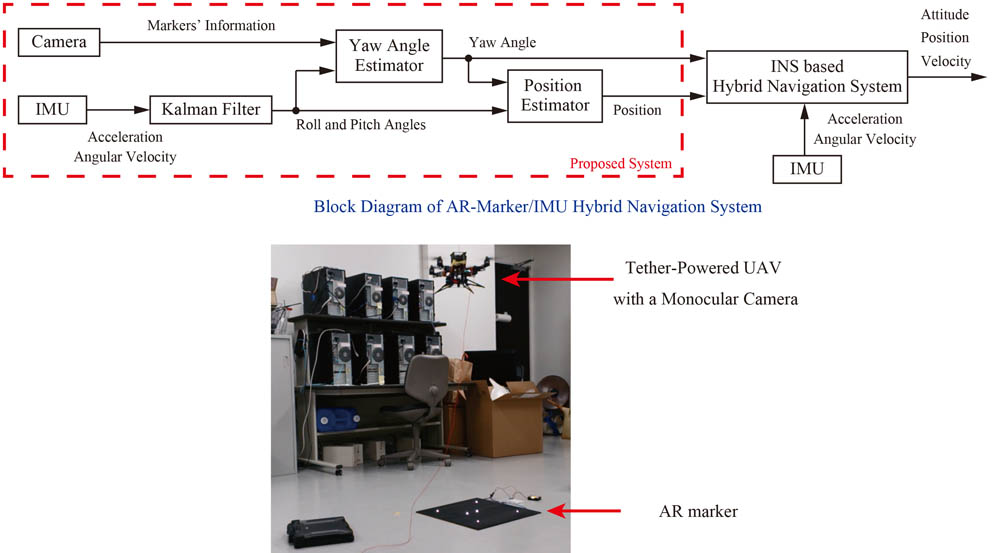
Block diagram and experimental system
- [1] S. Thrun, W. Burgard, and D. Fox, “Probabilistic Robotics,” The MIT Press, 2005.
- [2] H. Kato and M. Billinghurst, “Marker Tracking and HMD Calibration for a video-based Augmented Reality Conferencing System,” Proc. of the 2nd Int. Workshop on Augmented Reality, 1999.
- [3] H. Nakanishi, H. Hashimoto, N. Hosokawa, K. Inoue, and A. Sato, “Autonomous Flight Control System for Intelligent Aero-Robot for Disaster Prevention,” J. of Robotics and Mechatronics, Vol.15, No.5, pp. 489-497, 2003.
- [4] R. T. Azuma, “A Survey of Augmented Reality,” Teleoperators and Virtual Environments, Vol.6, No.4, pp. 355-385, 1997.
- [5] H. Fourati, D. Eddine, and C. Belkhiat, “Multisensor Attitude Estimation: Fundamental Concepts and Applications,” CRC Press, 2016.
- [6] H. Nakanishi, S. Kanata, T. Sawaragi, and Y. Horiguchi, “Methods to Estimate Magnetic Declination for an Unmanned Aerial Vehicle,” J. of Robotics and Mechatronics, Vol.20, No.4, pp. 541-549, 2008.
- [7] G. Wahba, “A Least-Squares Estimate of Satellite Attitude,” Problem 65.1, SIAM Review, July, pp. 384-386, 1966.
- [8] J. R. Wertz, “Spacecraft Attitude Determination and Control,” Kluwer Academic Pub., 1978.
- [9] M. D. Shuster and S. D. Oh, “Three-Axis Attitude Determination from Vector Observations,” AIAA J. of Guidance and Control, Vol.4, No.1, pp. 70-77, 1981.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.