Paper:
Experimental Study on Optimal Tracking Control of a Micro Ground Vehicle
Soichiro Watanabe and Masanori Harada
Graduate School of Science and Engineering, National Defense Academy of Japan
1-10-20 Hashirimizu, Yokosuka, Kanagawa 239-8686, Japan

This paper investigates the application of optimal control to a micro ground vehicle (MGV) experimentally. The model predictive control (MPC) technique is used for the overall tracking controller during the maneuver. The reference trajectory for MPC is preliminarily obtained by numerical computation of the optimal control problem, which is prescribed as a minimum-time maneuver. The results provide nominal tracking performance and validate the feasibility of the approach.
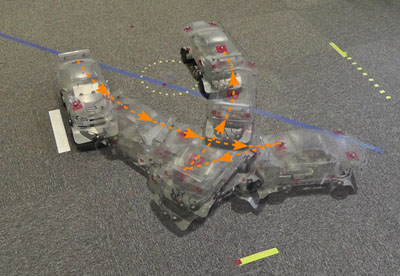
K-turn maneuver using MPC
- [1] H. Yoshida, M. Omae, and T. Wada, “Toward Next Active Safety Technology of Intelligent Vehicle,” J. of Robotics and Mechatronics, Vol.27, No.6, pp. 610-615, 2015.
- [2] T. Kobayashi and S. Majima, “Automatic Parking Control for a 4-Wheeled Vehicle by Non-Linear Receding Horizon Control,” Trans. of Japan Society of Mechanical Engineers, Series C, Vol.70, No.695, pp. 166-173, 2004 (in Japanese).
- [3] M. Hurni, P. Sekhavat, and I. M. Ross, “Autonomous Trajectory Planning Using Real-Time Information Updates,” AIAA Guidance, Navigation and Control Conf., AIAA 2008-6305, 2008.
- [4] Q. Gong, L. R. Lewis, and I. M. Ross, “Pseudospectral Motion Planning for Autonomous Vehicles,” J. of Guidance, Control, and Dynamics, Vol.32, No.3, pp. 1039-1045, 2009.
- [5] S. Watanabe and M. Harada, “Optimal Guidance and Control of Micro Ground Vehicles,” Proc. of 2014 JSAE Annual Congress (spring), No.40-14, pp. 15-20, 2014 (in Japanese).
- [6] S. Watanabe and M. Harada, “Optimal Tracking Control of an Micro Ground Vehicle,” J. of Robotics and Mechatronics, Vol.27, No.6, pp. 653-659, 2015.
- [7] J. M. Maciejowski, “Predictive Control with Constraints,” Pearson Education Limited, 2002 (S. Adachi and M. Kanno (trans.), Predictive Control with Constraints), Tokyo Denki University Press, 2005 (in Japanese).
- [8] T. Ohtsuka (Ed.), “Practical Application of Control by Real-Time Optimization,” Corona Publishing, 2015 (in Japanese).
- [9] K. Oyama and K. Nonaka, “Model Predictive Parking Control for Nonholonomic Vehicles using Time-State Control Form,” 2013 European Control Conf., pp. 458-465, 2013.
- [10] K. Oyama and K. Nonaka, “Model Predictive Parking Control with Obstacle Avoidance Considering Automatic Tuning of Switching Point,” Trans. of the Society of Instrument and Control Engineers, Vol.50, No.1, pp. 9-17, 2014 (in Japanese).
- [11] S. Watanabe and M. Harada, “Real-Time Optimal Feedback Control of UGVs Using Modified Carathéodory-π Solutions,” Proc. of 12th Int. Symposium on Advanced Vehicle Control, CD-ROM, pp. 385-390, 2014.
- [12] S. Watanabe and M. Harada, “Real-Time Optimal Obstacle Avoidance of MGV Using Modified Carathéodory-π Solutions,” Proc. of 13th Int. Symposium on Advanced Vehicle Control, Th-A1-4, CD-ROM, 2016.
- [13] A. E. Bryson and Y. C. Ho, “Applied Optimal Control,” Taylor & Francis, Levittown, 1975.
- [14] J. Z. Ben-Asher, “Optimal Control Theory with Aerospace Applications,” AIAA Education Series, Virginia, 2010.
- [15] M. Harada, “Direct Trajectory Optimization by a Jacobi Pseudospectral Method with the Weights of High-Order Gauss-Lobatto Formulae,” Trans. of Japan Society of Mechanical Engineers, Series C, Vol.73, No.728, pp. 119-124, 2007 (in Japanese).
- [16] M. Harada, “Covector Estimation for Optimal Control Solver using a Jacobi Pseudospectral Method,” Trans. of the Society of Instrument and Control Engineers, Vol.49, No.8, pp. 808-815, 2013 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.