Paper:
Control Method for Helicopters Tethered to Ground Station with Compensation for Disturbance Caused by Cable Tension
Atsushi Imadu, Takanori Sakai, and Tadao Kawai
Department of Mechanical and Physical Engineering, Graduate School of Engineering, Osaka City University
3-3-138 Sugimoto, Sumiyoshi, Osaka 558-8585, Japan

This paper proposes cable tension compensation control method for helicopters cabled to a ground station. This method can be applied to human-operated systems and reduces the required control skill. The cable tension vector is measured by a force sensor and an angle sensor mounted to the helicopter. Thrust and helicopter attitude to balance with resultant force of tension and gravity are calculated and automatically added to attitude controller input calculated by using PID control. Simulation and experimental results demonstrate the validity of the proposed method.
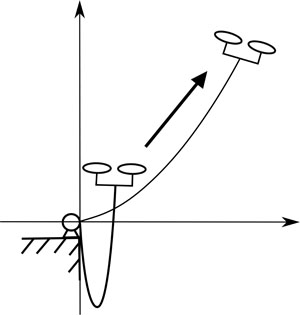
Static balanced helicopters in different positions
- [1] K. Nonami, “Drone Technology, Cutting-Edge Drone Business, and Future Prospects,” J. of Robotics and Mechatronics, Vol.28, No.3, pp. 262-272, 2016.
- [2] K. Sato and R. Daikoku, “A Simple Autonomous Flight Control of Multicopter Using Only Web Camera,” J. of Robotics and Mechatronics, Vol.28, No.3, pp. 286-294, 2016.
- [3] M. Sonobe, M. Miwa, and J. Hino, “Effectiveness of Delayed Feedback Control Applied to a Small-Size Helicopter with a Suspended Load System,” J. of Robotics and Mechatronics, Vol.28, No.3, pp. 351-359, 2016.
- [4] J. Ashizawa, S. Higa, J. V. T. Silveira, H. Otsuka, K. Nagatani, and K. Yoshida, “Development of the weird MUAV system mounted Mobile Robot for long time interior exploration,” Proc. of SICE System Integration Division Annual Conf., pp. 266-270, 2014 (in Japanese).
- [5] L. A. Sandino, M. Bejar, K. Kondak, and A. Ollero, “On the Use of Tethered Configurations for Augmenting Hovering Stability in Small-size Autonomous Helicopters,” J. of Intelligent and Robotic Systems, Vol.70, No.1-4, pp. 509-525, 2013.
- [6] L. A. Sandino, M. Bejar, K. Kondak, and A. Ollero, “Advances in Modeling and Control of Tethered Unmanned Helicopters to Enhance Hovering Performance,” J. of Intelligent and Robotic Systems, Vol.73, No.1-4, pp. 3-18, 2014.
- [7] M. M. Nicotra, R. Naldi, and E. Garone, “Taut Cable Control of a Tethered UAV,” Proc. of 19th IFAC World Congress, Vol.47, Issue 3, pp. 3190-3195, 2014.
- [8] S. Lupashin and R. D’Andrea, “Stabilization of a flying vehicle on a taut tether using inertial sensing,” 2013 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2432-2438, 2013.
- [9] M. Tognon and A. Franchi, “Nonlinear observer-based tracking control of link stress and elevation for a tethered aerial robot using inertial-only measurements,” 2015 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 3994-3999, 2015.
- [10] M. Tognon and A. Franchi, “Nonlinear Observer for the Control of Bi-Tethered Multi Aerial Robots,” 2015 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 1852-1857, 2015.
- [11] A. Imadu, H. Noguchi, and T. Kawai, “Control of Helicopters Cabled to Ground Station – Compensation of Cable Tension and the Tension Estimation Method –,” Trans. of the Society of Instrument and Control Engineers, Vol.50, No.12, pp. 821-828, 2014 (in Japanese).
- [12] A. Imadu, H. Noguchi, and T. Kawai, “Optimum Cable Length for Helicopter with Cable to Ground Station,” Trans. of the Society of Instrument and Control Engineers, Vol.52, No.4, pp. 220-227, 2016 (in Japanese).
- [13] H. Noguchi and A. Imadu, “Study on Control of Cable Length in Helicopter System with the Cable to Ground Station,” Proc. of the 31st Annual Conf. of the Robotics Society of Japan, 1D3-03, 2013 (in Japanese).
- [14] H. Noguchi and A. Imadu, “Study on Control of Quadrotor Helicopter with Cable to Ground Station,” Proc. of the 18th Robotics Symposia, pp. 492-497, 2013 (in Japanese).
- [15] M. Minotani, H. Noguchi, and A. Imadu, “Study on Control of Multi-rotor helicopter Cabled to Ground Station,” Proc. of the 32nd Annual Conf. of the Robotics Society of Japan, 3M2-03, 2014 (in Japanese).
- [16] A. Shinch, D. Iwakura, and K. Nonami, “A study on Coupled Vibration between Cable and Body of Wired-powered Multi-rotor Helicopter,” Proc. of the 2014 JSME Conf. on Robotics and Mechatronics, 2A1-D03, 2014 (in Japanese).
- [17] Y. Sekine, J. Toyoda, J. Hasegawa, M. Hara, and K. Matsuura, “Modern Electric Power Transmission Engineering,” Ohmsha, Ltd., 1992 (in Japanese).
- [18] Y. Otsuka and M. Yokoyama, “Speed Control of Four-Rotor Mini Helicopter,” Proc. of Dynamics & Design Conf. 2006, pp. 543-1-543-4, 2006 (in Japanese).
- [19] K. Hazawa, J. Shin, D. Fujiwara, K. Igarashi, F. Dilshan, and K. Nonami, “Autonomous Flight Control of Hobby-Class Small Unmanned Helicopter,” Trans. of the JSME, No.691, pp. 720-727, 2004 (in Japanese).
- [20] JIS C3306 02:2000 polyvinyl chloride insulated flexible cords, 2000.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.