Paper:
Measurement Experiments and Analysis for Modeling of McKibben Pneumatic Actuator
Daisuke Nakanishi*, Yasuhiro Sugimoto*, Hiroaki Honda*, and Koichi Osuka*,**
*Osaka University
2-1 Yamadaoka, Suita, Osaka 565-0871, Japan
**CREST, Japan Science and Technology Agency

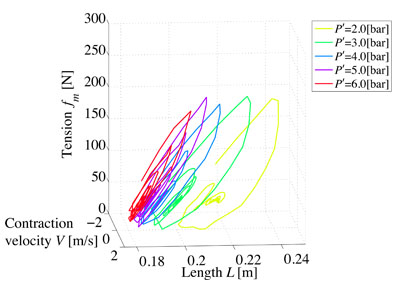
Relation between V, L and fm on constant pressure condition
- [1] T. Noritsugu and T. Tanaka, “Application of rubber artificial muscle manipulator as a rehabilitation robot,” IEEE/ASME Trans. Mechatronics, Vol.2, No.4, pp. 259-267, 1997.
- [2] T. Noritsugu, D. Sasaki, M. Kameda, A. Fukunaga, and M. Takaiwa, “Wearable power assist device for standing up motion using pneumatic rubber artificial muscles,” J. of Robotics and Mechatronics, Vol.19, No.6, pp. 619-628, 2007.
- [3] M. Wisse and J. van Frankenhuyzen, “Design and Construction of MIKE; a 2-D Autonomous Biped Based on Passive Dynamic Walking,” Springer Tokyo, 2003.
- [4] T. Takuma and K. Hosoda, “Controlling the walking period of a pneumatic muscle walker,” The Int. J. of Robotics Research, Vol.25, No.9, pp. 861-866, 2006.
- [5] K. Hosoda, Y. Sakaguchi, H. Takayama, and T. Takuma, “Pneumatic-driven jumping robot with anthropomorphic muscular skeleton structure,” Autonomous Robots, Vol.28, No.3, pp. 307-316, 2010.
- [6] C-P. Chou and B. Hannaford, “Measurement and modeling of mckibben pneumatic artificial muscles,” Robotics and Automation, Vol.12, pp. 90-102, 1996.
- [7] P. Tondu and B. and Lopez, “Modeling and control of McKibben artificial muscle robot actuators,” IEEE Control Systems Magazine, Vol.20, No.2, pp. 15-38, 2000.
- [8] G. K. Klute, J. M. Czerniecki, and B. Hannaford, “Artificial muscles: Actuators for biorobotic systems,” The Int. J. of Robotics Research, Vol.21, No.4, pp. 295-309, 2002.
- [9] K. Urabe and K. Kogiso, “Hybrid nonlinear model of mckibben pneumatic artificial muscle systems incorporating a pressure-dependent coulomb friction coefficient,” IEEE Multi-Conf. on Systems and Control, pp. 1571-1578, 2015.
- [10] K. Urabe and K. Kogiso, “Application of hybrid model predictive control to mckibben pneumatic artificial muscle system,” SICE Int. Symposium on Control Systems, 514-5, 2015.
- [11] Y. Sugimoto, K. Naniwa, K. Osuka, and Y. Sankai, “Static and dynamic properties of mckibben pneumatic actuator for self-stability of legged-robot motion,” Advanced Robotics, Vol.27, No.6, 2013.
- [12] H. Honda, D. Nakanishi, Y. Sugimoto, K. Osuka, and Y. Sankai, “Measurement experiments and analysis for modeling dynamic properties of McKibben Pneumatic Actuator,” Proc. of the 2015 JSME Conf. on Robotics and Mechatronics, 2015.
- [13] D. Nakanishi, Y. Sueoka, Y. Sugimoto, and K. Osuka, “Numerical analysis and experimental verification for standing posture and joint stiffness of a 2-dimensional legged robot driven by McKibben pneumatic actuator,” Trans. of SICE, Vol.51, No.12, pp. 858-865, 2015.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.