Paper:
A Suitable Design of Assist System for Human Meal by Reducing Maneuverability Variance in Workspace
Kiyotaka Fukui* and Katsuyoshi Tsujita**
*Major in Biomedical Engineering, Graduate School of Engineering, Osaka Institute of Technology
5-16-1 Omiya, Asahi-ku, Osaka 535-8585, Japan
**Department of Electric and Electronic Systems Engineering, Faculty of Engineering, Osaka Institute of Technology
5-16-1 Omiya, Asahi-ku, Osaka 535-8585, Japan

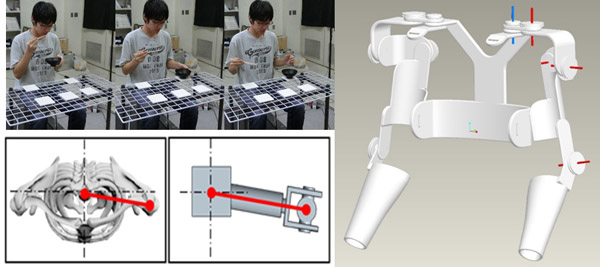
A suitable design for the assist system for human meal
- [1] L. S. Noelker and R. Browdie, “Sidney Katz, MD: A New Paradigm for Chronic Illness and Long-Term Care,” The Gerontologist, Vol.54, No.1, pp. 13-20, 2013.
- [2] S. Ishii, S. Tanaka, and F. Hiramatsu, “Meal Assistance Robot for Severely Handicapped People,” IEEE Int. Conf. on Robotics and Automation, pp. 1308-1313, 1995.
- [3] T. Sakaki, “An Effective Design Method for Welfare Robot and its Application to the Design of Meal-Assistance Robot,” IEEE Int. Symposium on Robot and Human Interactive Communication, pp. 309-314, 2008.
- [4] E. Ohara, K. Yano, S. Horihata, T. Aoki, and Y. Nishimoto, “Development of Tremor-Suppression Filter for Meal-Assist Robot,” Eurohaptics Conf. and Symposium on Haptic Interfaces For Virtual Environment and Teleoperator Systems, pp. 238-243, 2009.
- [5] T. Otsuka, K. Kawaguchi, H. Kawamoto, and Y. Sankai, “Development of Upper-limb type HAL and Reaching Movement for Meal-Assistance,” IEEE Int. Conf. on Robotics and Biomimetics, pp. 883-888, 2011.
- [6] I. Naotunna, C. J. Perera, C. Sandaruwan, R. A. R. C. Gopura, and T. D. Lalitharatne, “Meal Assistance Robots: A Review on Current Status, Challenges and Future Directions,” IEEE/SICE Int. Symposium on System Integration, pp. 211-216, 2015.
- [7] J. Rosen, J. C. Perry, N. Manning, S. Burns, and B. Hannaford, “The Human Arm Kinematics and Dynamics During Daily Activities – Toward a 7 DOF Upper Limb Powered Exoskeleton,” Advanced Robotics, pp. 532-539, 2005.
- [8] D. P. Romilly, C. Anglin, R. G. Gosine, C. Hersher, and S. U. Raschke, “A Functional Task Analysis and Motion Simulation for the Development of a Powered Upper-Limb Orthosis,” IEEE Trans. on Rehabilitation Engineering, Vol.2, No.3, pp. 119-129, 1994.
- [9] K. Mishima, S. Kanata, H. Nakanishi, T. Sawaragi, and Y. Horiguchi, “Extraction of Similarities and Differences in Human Behavior Using Singular Value Decomposition,” IEICE, pp. 293-302, 2011 (in Japanese).
- [10] Y. Matsumoyo et al. “Development of an Exoskeleton to Support Eating Movements in Patients with Essential Tremor,” J. of Robotics and Mechatronics, Vol.25, No.6, pp. 949-958, 2013.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.