Paper:
Operator-Based Robust Nonlinear Control Design of a Robot Arm with Micro-Hand
Zhengxiang Ma*, Aihui Wang**, and Tiejun Chen*
*School of Electric Engineering, Zhengzhou University
No.100, Science Road, Zhengzhou 450001, China
**School of Electric and Information Engineering, Zhongyuan University of Technology
41 Zhongyuan Road, Zhengzhou 450007, China

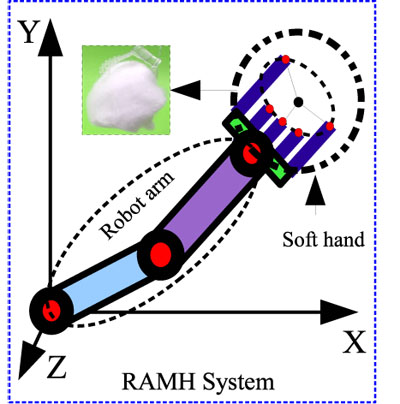
Robot arm with micro-hand system
- [1] S. Wittmeier, C. Alessandro, N. Bascarevic, K. Dalamagkidis, D. Devereus, A. Diamond, M. Jantsch, K. Jovanovic, R. Knight, H. G. Marques, P. Milosavljevic, B. Mitra, B. Svetozarevic, V. Potkonjak, R. Pfeifer, A. Knoll, and O. Holland, “Toward anthropomimetic robotics: development, simulation, and control of a musculoskeletal torso,” Artificial Life, Vol.19, No.1, pp. 171-193, 2014.
- [2] M. Yamashita, “Robotic rehabilitation system for human upper limbs using guide control and manipulability ellipsoid prediction,” Procedia Technology, Vol.15, pp. 560-566, 2014.
- [3] J. Zlotowski, D. Proudfoot, K. Yogeeswaran, and C. Bartneck, “Anthropomorphism: opportunities and challenges in human-robot interaction,” Int. J. Social Robotics, Vol.7, No.3, pp. 347-360, 2015.
- [4] H. Cha, K. Koh, and B. Yi, “Stiffness modeling of a soft finger,” Int. J. Control, Automation, and Systems, Vol.12, No.1, pp. 111-117, 2014.
- [5] F. Lewis, D. Dawson, and C. Abdallah, “Robot Manipulator Control: Theory and Practice,” Marcel Dekker, Inc., 2004.
- [6] K. Althoefer, B. Krekelberg, D. Husmeier, and L. Seneviratne, “Reinforcement learning in a rule-based navigator for robotic manipulators,” Neurocomputing, Vol.37, No.1-4, pp. 51-70, 2011.
- [7] C. Chiena and A. Tayebib, “Further results on adaptive iterative learning control of robot manipulators,” Automatica, Vol.44, No.3, pp. 830-837, 2008.
- [8] S. Islam and P. Liu, “Robust adaptive fuzzy output feedback control system for robot manipulators,” IEEE Trans. on Mechatronics, Vol.16, No.2, pp. 288-296, 2011.
- [9] H. Kang and J. Wang, “Adaptive robust control of 5 DOF upper-limb exoskeleton robot,” Int. J. Control, Automation, and Systems, Vol.13, No.3, pp. 733-741, 2015.
- [10] V. Arakelian, J. L. Baron, and P. Mottu, “Torque minimisation of the 2-DOF serial manipulators based on minimum energy consideration and optimum mass redistribution,” Mechatronics, Vol.21, No.1, pp. 310-314, 2011.
- [11] S. Devasia, “Nonlinear minimum-time control with pre- and post-actuation,” Automatica, Vol.47, No.7, pp. 1379-1387, 2011.
- [12] N. Kumara, V. Panwar, N. Sukavanam, S. P. Sharma, and J. H. Borm, “Neural network-based nonlinear tracking control of kinematically redundant robot manipulators,” Mathematical and Computer Modelling, Vol.53, No.9-10, pp. 1889-1901, 2011.
- [13] S. Islam and X. Liu, “Robust sliding mode control for robot manipulators,” IEEE Trans. on Industrial Electronics, Vol.58, No.6, pp. 2444-2453, 2011.
- [14] M. R. Soltanpour, P. Otadolajam, and M. H. Khooban, “Robust control strategy for electrically driven robot manipulators: adaptive fuzzy sliding mode,” IET Science, Measurement & Technology, Vol.9, No.3, pp. 322-334, 2015.
- [15] Z. Yang, Y. Fukushima, and P. Qin, “Decentralized adaptive robust control of robot manipulators using disturbance observers,” IEEE Trans. on Control Systems Technology, Vol.20, No.5, pp. 1357-1365, 2012.
- [16] Z. Chu, J. Cui, and F. Sun, “Fuzzy adaptive disturbance-observer-based robust tracking control of electrically driven free-floating space manipulator,” IEEE Systems J., Vol.8, No.2, pp. 343-352, 2014.
- [17] D. Sasaki, T. Noritsugu, and M. Takaiwa, “Development of pneumatic soft robot hand for human friendly robot,” J. of Robotics and Mechatronics, Vol.15, No.2, pp. 164-171, 2003.
- [18] G. Belforte, G. Eula, A. Ivanov, and S. Sirolli, “Soft pneumatic actuators for rehabilitation,” Actuators, Vol.3, pp. 84-106, 2014.
- [19] L. Bodenhagen, A. F. Fugl, A. Jordt, M. Willatzen, K. A. Andersen, and M. M.Olsen, “An adaptable robot vision system performing manipulation actions with flexible objects,” IEEE Trans. on Automation Science and Engineering, Vol.11, No.3, pp. 749-765, 2014.
- [20] C. Laschi and M. Cianchetti, “Soft robotics: new perspectives for robot bodyware and control,” Bioengineering and Biotechnology, doi:10.3389/fbioe.2014.00003, 2014.
- [21] K. Kawashima, T. Sasaki, T. Miyata, N. Nakamura, M. Sekiguchi, and T. Kagawa, “Development of robot using pneumatic artificial rubber muscles to operate construction machinery,” J. of Robotics and Mechatronics, Vol.16, No.1, pp. 8-16, 2004.
- [22] M. Deng, S. Bi, and A. Inoue, “Robust nonlinear control and tracking design for multi-input multi-output nonlinear perturbed plants,” IET Control Theory & Applications, Vol.3, No.9, pp. 1237-1248, 2009.
- [23] M. Deng, “Operator-based nonlinear control system design and applications,” Wiley-IEEE Press, New York, 2014.
- [24] A. Wang, D. Wang, H. Wang, S. Wen, and M. Deng, “Nonlinear perfect tracking control for a robot arm with uncertainties using operator-based robust right coprime factorization approach,” J. of Robotics and Mechatronics, Vol.27, No.1, pp. 49-56, 2015.
- [25] D. Wang, F. Li, X. Qi, P. Liu, and M. Deng, “Operator-based sliding-mode nonlinear control design for a process with input constraint,” J. of Robotics and Mechatronics, Vol.27, No.1, pp. 83-90, 2015.
- [26] A. Wang, M. Deng, and D. Wang, “Operator-based robust control design for a human arm-like manipulator with time-varying delay measurement,” Int. J. Control, Automation, and systems, Vol.11, No.6, pp. 1112-1121, 2013.
- [27] A. Wang, M. Deng, S. Wakimoto, and T. Kawashima, “Characteristics analysis and modeling of a miniature pneumatic curling rubber actuator,” Int. J. Innovative Computing, Information and Control, Vol.10, No.3, pp. 1029-1039, 2014.
- [28] T. Kawashima, A. Wang, S. Wakimoto, and M. Deng, “Sensorless nonlinear control for a miniature pneumatic curling rubber actuator using robust right coprime factorization and SVR estimation,” IEEJ Trans. Electronics, Information and Systems, Vol.133, No.10, pp. 1924-1929, 2013.
- [29] S. Wakimoto, K. Suzumori, and K. Ogura, “A miniature pneumatic curling rubber actuator generating bidirectional motion with one air-supply tube,” Advanced Robotics, Vol.25, No.9-10, pp. 1311-1330, 2011.
- [30] A. Wang, Y. Fu, L. Liu, and J. Xiao, “Robust tracking control design to nonlinear plants with perturbation using operator-based observers,” Proc. 2014 Int. Conf. Advanced Mechatronic Systems, pp. 17-22, 2014.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.