Paper:
Practical Applications of HORNET to Inspect Walls of Structures
Yuhei Tokura, Kohei Toba, and Yogo Takada
Mechanical and Physical Engineering, Graduate School of Engineering, Osaka City University
3-3-138 Sugimoto, Sumiyoshi-ku, Osaka-shi, Osaka 558-8585, Japan

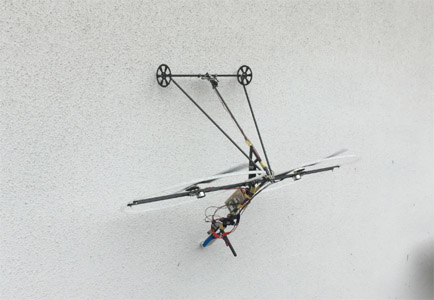
Photograph of HORNET catching onto a wall
- [1] Y. Takada, K. Kirimoto, T. Tajiri, and T. Kawai, “Development of a bridge inspection robot working in three-dimensional environment (evaluation of driving performance of a moving mechanism with permanent magnets),” Trans. of the Japan Society of Mechanical Engineers, Series C, Vol.79, No.805, pp. 3135-3146, 2013.
- [2] H. Kim, D. Kim, H. Yang, K. Lee, K. Seo, D. Chang, and J. Kim, “Development of a wall-climbing robot using a tracked wheel mechanism,” J. of Mechanical Science and Technology, Vol.22, pp. 1490-1498, 2008.
- [3] T. Miyake, H. Ishihara, and T. Tomino, “Vacuum-based wet adhesion system for wall climbing robot – mcasurement of lubricating action and seal action by liquid –,” Proc. of the 2008 JSME Conf. on Robotics and Mechatronics, 2008.
- [4] B. L. Luk , D. S. Cooke, S. Galt, A. A. Collie, and S. Chen, “Intelligent legged climbing service robot for remote maintenance applications in hazardous environments,” Robotics and Autonomous Systems, Vol.53, Issue 2, pp. 142-152, 2005.
- [5] J. Xiao and A. Sadegh, “City-Climber: A New Generation Wall-climbing Robots, Climbing and Walking Robots,” Towards New Applications, pp. 383-402, 2007.
- [6] M. Ono, T. Hamano, and S. Kato, “Modeling and Fabrication of a Mobile Inspection Microrobot Driven by a Pneumatic Bellows Actuator for Long Pipes,” J. of Robotics and Mechatronics, Vol.18, No.1, pp. 11-17, 2006.
- [7] N. Gravish, M. Wilkinson, and K. Autumn, “Frictional adhesion: a new angle on gecko attachment,” Integrative and Comparative Biology, Vol.42, Issue 6, pp. 1081-1090, 2006.
- [8] C. Menon, M. Murphy, and M. Sitti, “Gecko Inspired Surface Climbing Robots,” Robotics and Biomimetics, pp. 431-436, 2004.
- [9] M. P. Murphy and M. Sitti, “Waalbot: An Agile Small-Scale Wall-Climbing Robot Utilizing Dry Elastomer Adhesives,” IEEE/ASME Trans. on Mechatronics, Vol.12, No.3, pp. 330-338, 2007.
- [10] O. Unver, A. Uneri, A. Aydemir, and M. Sitti, “Geckobot: A Gecko Inspired Climbing Robot Using Elastomer Adhesives,” Robotics and Automation, pp. 2329-2335, 2006.
- [11] W. Shen, J. Gu, and Y. Shen, “Permanent magnetic system design for the wall-climbing robot,” Applied Bionics and Biomechanics, Vol.3, No.3, pp. 151-159, 2006.
- [12] K. A. Daltorio, A. D. Horchler, S. Gorb, R. E. Ritzmann, and R. D. Quinn, “A Small Wall-Walking Robot with Compliant, Adhesive Feet,” Intelligent Robots and Systems, pp. 4018-4023, 2005.
- [13] J. C. Zufferey, A. Klaptocz, A. Beyeler, J. D. Nicoud, and D. Floreano, “A 10-gram Vision-based Flying Robot,” Intelligent Robots and Systems, pp. 3267-3272, 2006.
- [14] F. Caballero, L. Merino, J. Ferruz, and A. Ollero, “A visual odometer without 3D reconstruction for aerial vehicles. Applications to building inspection,” Robotics and Automation, pp. 4673-4678, 2005.
- [15] V. Lippiello and B. Siciliano, “Wall Inspection Control of a VTOL Unmanned Aerial Vehicle Based on a Stereo Optical Flow,” Intelligent Robots and Systems, pp. 4296-4302, 2012.
- [16] M. Ota, J. Wang, Y. Sato, and K. Nonami, “Optimal autonomous control of small-scale electrical driven helicopter with mimo model,” Proc. of the 2011 JSME Conf. on Robotics and Mechatronics, 2011.
- [17] Y. Sakai and M. Miwa, “Development of tailsitter vtol using multi rotor system,” Proc. of the 2015 JSME Conf. on Robotics and Mechatronics, 2015.
- [18] D. Iwakura and K. Nonami, “Indoor Localization of Flying Robot by Means of Infrared Sensors,” J. of Robotics and Mechatronics, Vol.25, No.1, pp. 201-210, 2013.
- [19] M. Ichikawa, H. Yamada, and J. Takeuchi, “Flying Robot with Biologically Inspired Vision,” J. of Robotics and Mechatronics, Vol.13, No.6 , pp. 621-624, 2001.
- [20] Y. Tokura and Y. Takada, “Development of Inspection Robot HORNET for Wall of Structures,” Proc. of the 2015 JSME Conf. on Robotics and Mechatronics, 2015.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.