Paper:
Teaching Mobile Robots Using Custom-Made Tools by a Semi-Direct Method
Jorge David Figueroa Heredia*, Hamdi Sahloul*, and Jun Ota**
*Department of Precision Engineering, School of Engineering, The University of Tokyo
7-3-1 Hongo, Bunkyo, Tokyo 113-8656, Japan
**Research into Artifacts, Center for Engineering (RACE), The University of Tokyo
5-1-5 Kashiwanoha, Kashiwa-shi, Chiba 277-8568, Japan

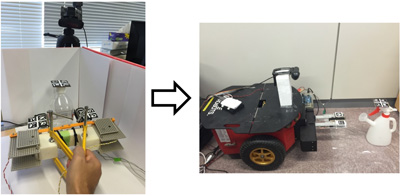
Teach grasping point by custom-made tool
- [1] H. Asada and H. Izumi, “Direct Teaching and Automatic Program Generation for the Hybrid Control of Robot Manipulators,” IEEE Int. Conf. on Robotics and Automation, pp. 1401-1406, 1987.
- [2] D. Kushida, M. Nakamura, S. Goto, and N. Kyura, “Human Direct Teaching of Industrial Articulated Robot Arms Based on Force-Free Control,” Artificial Life in Robotics, Vol.5, Issue 1, pp. 26-32, 2001.
- [3] S. Muto and K. Shimokura, “Teaching and Control of Robot Contour-tracking Using Contact Point Detection,” IEEE Int. Conf. on Robotics and Automation, Vol.1, pp. 674-681, 1994.
- [4] A. K. Gupta and S. K. Arora, “Industrial Automation and Robotics,” Laxmi Publications, pp. 372-374, 2013.
- [5] K. Yamazaki, T. Tsubouchi, and M. Tomono, “Furniture Model Creation through Direct Teaching to a Mobile Robot,” J. of Robotics and Mechatronics, Vol.20, No.2, pp. 213-220, 2008.
- [6] B. D. Argall, S. Chernova, M. Veloso, and B. Browning, “A Survey of Robot Learning from Demonstration,” Robotics and Autonomous Systems, Vol.57, Issue 5, pp. 469-483, 2009.
- [7] A. Skoglund, B. Iliev, B. Kadmiry, and R. Palm, “Programming by Demonstration of Pick-and-Place Tasks for Industrial Manipulators Using Task Primitives,” CIRA, pp. 368-373, 2007.
- [8] J. J. Steil, F. Röthling, R. Haschke, and H. Ritter, “Situated Robot Learning for Multi-modal Instruction and Imitation of Grasping,” Robotics and Autonomous Systems, Vol.47, Issue 2-3, pp. 129-141, 2004.
- [9] J. Miura, K. Iwase, and Y. Shirai, “Interactive Teaching of a Mobile Robot,” IEEE Int. Conf. on Robotics and Automation, pp. 3389-3394, 2005.
- [10] H. Friedrich, J. Holle, and R. Dillmann, “Interactive Generation of Flexible Robot Programming,” IEEE Int. Conf. on Robotics and Automation, pp. 538-543, 1998.
- [11] J. P. Bandera, R. Marfil, L. Molina-Tanco, J. A. Rodríguez, A. Bandera, and F. Sandoval, “Humanoid Robots: Human-Like Machines,” Itech, Vienna, Austria, chapter Robot Learning by Active Imitation, pp. 519-535, 2007.
- [12] Y. Lin, S. Ren, M. Clevenger, and Y. Sun, “Learning Grasping Force from Demonstration,” IEEE Int. Conf. on Robotics and Automation, pp. 1526-1531, 2010.
- [13] Y. Maeda and Y. Moriyama, “View-Based Teaching/Playback for Industrial Manipulators,” IEEE Int. Conf. on Robotics and Automation, pp. 4306-4311, 2011.
- [14] S. B. Kang and K. Ikeuchi, “A Robot System that Observes and Replicates Grasping Tasks,” Fifth Int. Conf. on Computer Vision, pp. 1093-1099, 1995.
- [15] K. Ogawara, J. Takamatsu, H. Kimura, and K. Ikeuchi, “Extraction of Essential Interactions through Multiple Observations of Human Demonstration,” IEEE Trans. on Industrial Electronics, pp. 667-675, 2003.
- [16] A. Skoglund, B. Iliev, and R. Palm, “Programming-by-Demonstration of Reaching Motions Using a Next-State-Planner,” Robotics and Autonomous Systems, Vol.58, Issue 5, pp. 607-621, 2010.
- [17] K. Inoue, T. Arai, and J. Ota, “Acceleration of Reinforcement Learning by a Mobile Robot Using Generalized Inhibition Rules,” J. of Robotics and Mechatronics, Vol.22, No.1, pp. 122-133, 2010.
- [18] J. D. Figueroa Heredia and J. Ota, “Semi-Direct Teaching Method for Grasping Objects in Service Mobile Robot Systems – Teaching Data Generation –,” Proc. IEEE Int. Conf. on Systems, Man, and Cybernetics SMC, pp. 2390-2395, Manchester, UK, October 13-16, 2013.
- [19] D. Di Marco, A. Koch, O. Zweigle, K. Haussermann, B. Schiessle, P. Levi, D. Galvez-Lopez, L. Riazuelo, J. Civera, J. M. M. Montiel, M. Tenorth, A. Perzylo, M. Waibel, and R. Van de Molengraft, “Creating and Using RoboEarth Object Models,” IEEE Int. Conf. on Robotics and Automation, pp. 3549-3550, 2012.
- [20] M. Quigley, B. Gerkey, K. Conley, J. Faust, T. Foote, J. Leibs, E. Berger, R. Wheeler, and A. Ng, “ROS: An Open-source Robot Operating System,” IEEE Int. Conf. on Robotics and Automation (ICRA) Workshop on Open Source Robotics, Kobe, Japan, 2009.
- [21] M. Kutner, J. Neter, C. Nachtsheim, and W. Li, “Applied Linear Statistical Models,” McGraw-Hill Education; 5th Int. edition, 2004.
- [22] J. Brooke, “SUS: A Quick and Dirty Usability Scale,” Digital Equipment Co., Ltd., Reading, United Kingdom, 1996.
- [23] Y. Huang, Y. S. Yong, R. Chiba, T. Arai, T. Ueyama, and J. Ota, “Kinematic Control with Singularity Avoidance for Teaching-Playback Robot Manipulator System,” IEEE Trans. on Automation Science and Engineering, pp. 1-14, 2015.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.