Paper:
A New Close-Loop Control Method for an Inspection Robot Equipped with Electropermanent-Magnets
Pakpoom Kriengkomol, Kazuto Kamiyama, Masaru Kojima, Mitsuhiro Horade, Yasushi Mae, and Tatsuo Arai
Department of Systems Innovation, Graduate School of Engineering Science, Osaka University
1-3 Machikaneyama, Toyonaka, Osaka 560-8531, Japan

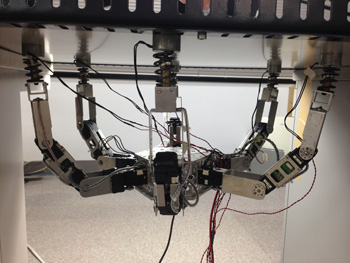
ASTERISK use our proposed method to walk
- [1] Y. Fujino, “Steel bridges in japan,” Steel Construction Today & Tomorrow, Vol.15, Japanese Society of Steel Construction, pp. 1-19, 2006.
- [2] S. Sakai, “The Measure Towards Maintenance by New Technology for Expressway Bridges in Japan,” 24th US-Japan Bridge Engineering Workshop, pp. 1-12, 2008.
- [3] Y. Zhang, D. A. Novick, A. Hadavi, and R. J. Krizek, “Whole life cycle cost for Chicago-type bascule bridges,” Life Cycle cost of Bridges, pp. 2-18, 2008.
- [4] W. Shen, J. Gu, and Y. Shen, “Proposed wall climbing robot with permanent magnetic tracks for inspecting oil tanks,” 2005 IEEE Int. Conf. on Mechatronics and Automation, Vol.4, pp. 2072-2077, 2005.
- [5] Y. Zhang, T. Dodd, K. Atallah, and I. Lyne, “Design and optimization of magnetic wheel for wall and ceiling climbing robot,” 2010 IEEE Int. Conf. on Mechatronics and Automation (ICMA), pp. 1393-1398, 2010.
- [6] J. C. Grieco, M. Prieto, M. Armada, and P. G. de Santos, “A six-legged climbing robot for high payloads,” Proc. of the 1998 IEEE Int. Conf. on Control Applications, Vol.1, pp. 446-450, 1998.
- [7] A. Mazumdar and H. H. Asada, “Mag-foot: A steel bridge inspection robot,” 2009 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2009), pp. 1691-1696, 2009.
- [8] O. Unver and M. Sitti, “A miniature ceiling walking robot with flat tacky elastomeric footpads,” 2009 IEEE Int. Conf. on Robotics and Automation (ICRA'09), pp. 2276-2281, 2009.
- [9] Y. Gotoh and Y. Ishida, “Evaluation of electromagnetic inspection of outer side defect on small diameter and thick steel tube with steel support using 3-d nonlinear fem,” IEEE Trans. on Magnetics, Vol.50, No.11, pp. 1-4, 2014.
- [10] Y. Gotoh, H. Fujioka, and N. Takahashi, “Proposal of electromagnetic inspection method of outer side defect on steel tube with steel support plate using optimal differential search coils,” IEEE Trans. on Magnetics, Vol.47, No.5, pp. 1006-1009, 2011.
- [11] Y. Gotoh, K. Sakurai, and N. Takahashi, “Electromagnetic inspection method of outer side defect on small and thick steel tube using both ac and DC magnetic fields,” IEEE Trans. on Magnetics, Vol.45, No.10, pp. 4467-4470, 2009.
- [12] M. Kreutzbruck, U. Baby, A. Theiss, M. Muck, and C. Heiden, “Inspection of aircraft parts with high remanent magnetization by eddy current squid NDE,” IEEE Trans. on Applied Superconductivity, Vol.9, No.2, pp. 3805-3808, 1999.
- [13] D. Clatterbuck, T.-K. Lee, T. Shaw, N. Heinig, H.-M. Cho, J. Clarke, and J. Morris Jr., “Detection of plastic deformation gradients in steel using scanning squid microscopy,” IEEE Trans. on Applied Superconductivity, Vol.11, No.1, pp. 1307-1310, 2001.
- [14] S. Fujii, K. Inoue, T. Takubo, Y. Mae, and T. Arai, “Ladder climbing control for limb mechanism robot “asterisk”,” 2008 IEEE Int. Conf. on Robotics and Automation (ICRA 2008), pp. 3052-3057, 2008.
- [15] Y. Takahashi, T. Arai, Y. Mae, K. Inoue, and N. Koyachi, “Development of multi-limb robot with omnidirectional manipulability and mobility,” Proc. 2000 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2000), Vol.3, pp. 2012-2017, 2000.
- [16] K. Inoue, T. Tsurutani, T. Takubo, and T. Arai, “Omni-directional gait of limb mechanism robot hanging from grid-like structure,” 2006 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2006), 2006.
- [17] C. Theeravithayangkura, T. Takubo, K. Ohara, Y. Mae, and T. Arai, “Adaptive gait for dynamic rotational walking motion on unknown non-planar terrain by limb mechanism robot asterisk,” J. of Robotics and Mechatronics, Vol.25, No.1, 2013.
- [18] T. Arai, K. Kamiyama, P. Kriengkomol, Y. Mae, M. Kojima, and M. Horade, “Inspection robot in complicated 3d environments,” Int. Symposium on Automation and Robotics in Construction and Mining (ISARC 2015), 2015.
- [19] P. Kriengkomol, K. Kamiyama, M. Kojima, M. Horade, Y. Mae, and T. Arai, “Hammering sound analysis for infrastructure inspection by leg robot,” 2015 IEEE Int. Conf. on Robotics and Biomimetics (ROBIO 2015), 2015.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.