Paper:
Optimum Placement of Wireless Access Point for Mobile Robot Positioning in an Indoor Environment
Abdul Halim Ismail*,**, Ryosuke Tasaki*, Hideo Kitagawa***, and Kazuhiko Terashima*
*System and Control Laboratory, Department of Mechanical Engineering, Toyohashi University of Technology
1-1 Hibarigaoka, Tempaku-cho, Toyohashi 441-8580, Japan
**School of Mechatronic Engineering, Universiti Malaysia Perlis (UniMAP)
Pauh Putra Campus, 02600 Arau Perlis, Malaysia
***Department of Electronic Control Engineering, National Institute of Technology, Gifu College
2236-2 Kamimakuwa, Motosu, Gifu 501-0495, Japan

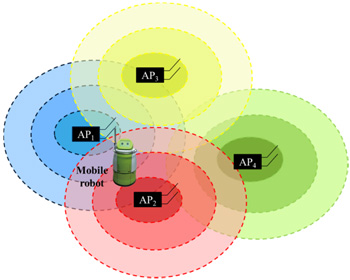
The placement objective so that the particular arrangement could provide enough signal data to the mobile robot
- [1] C.-C. Lin, M.-J. Chiu, C.-C. Hsiao, R.-G. Lee, and Y.-S. Tsai, “Wireless Health Care Service System for Elderly With Dementia,” IEEE Trans. Inf. Technol. Biomed., Vol.10, No.4, pp. 696-704, Oct. 2006.
- [2] L. a. Guerrero, F. Vasquez, and S. F. Ochoa, “An Indoor Navigation System for the Visually Impaired,” Sensors, Vol.12, No.6, pp. 8236-8258, 2012.
- [3] U. Varshney, “Pervasive Healthcare and Wireless Health Monitoring,” Mob. Networks Appl., Vol.12, No.2-3, pp. 113-127, Jun. 2007.
- [4] G. Borriello, V. Stanford, C. Narayanaswami, and W. Menning, “Guest Editors' Introduction: Pervasive Computing in Healthcare,” IEEE Pervasive Comput., Vol.6, No.1, pp. 17-19, Jan. 2007.
- [5] R. Angeles, “RFID Technologies: Supply-Chain Applications and Implementation Issues,” Inf. Syst. Manag., Vol.22, No.1, pp. 51-65, Dec. 2005.
- [6] R. Glidden, C. Bockorick, S. Cooper, C. Diorio, D. Dressler, V. Gutnik, C. Hagen, D. Hara, T. Hass, T. Humes, J. Hyde, R. Oliver, O. Onen, A. Pesavento, K. Sundstrom, and M. Thomas, “Design of ultra-low-cost UHF RFID tags for supply chain applications,” IEEE Commun. Mag., Vol.42, No.8, pp. 140-151, Aug. 2004.
- [7] M. Li and Y. Liu, “Underground coal mine monitoring with wireless sensor networks,” ACM Trans. Sens. Networks, Vol.5, No.2, pp. 1-29, Mar. 2009.
- [8] L. Mo, Y. He, Y. Liu, J. Zhao, S.-J. Tang, X.-Y. Li, and G. Dai, “Canopy closure estimates with GreenOrbs: sustainable sensing in the forest,” Proc. of the 7th ACM Conf. on Embedded Networked Sensor Systems (SenSys '09), p. 99, 2009.
- [9] Z. Yang, M. Li, and Y. Liu, “Sea Depth Measurement with Restricted Floating Sensors,” 28th IEEE Int. Real-Time Systems Symposium (RTSS 2007), pp. 469-478, 2007.
- [10] Y. Chen and J. Francisco, “A practical approach to landmark deployment for indoor localization,” Sens. Ad Hoc, Vol.11, 2006.
- [11] S.-H. Fang and T.-N. Lin, “A Novel Access Point Placement Approach for WLAN-Based Location Systems,” 2010 IEEE Wirel. Commun. Netw. Conf., pp. 1-4, Apr. 2010.
- [12] Y. Zhao, H. Zhou, and M. Li, “Indoor Access Points Location Optimization Using Differential Evolution,” 2008 Int. Conf. on Computer Science and Software Engineering, Vol.1, pp. 382-385, 2008.
- [13] O. Baala, Y. Zheng, and A. Caminada, “The Impact of AP Placement in WLAN-Based Indoor Positioning System,” 2009 Eighth Int. Conf. Networks, pp. 12-17, 2009.
- [14] L. E. Miller, “Propagation Model Sensitivity Study,” Contract Report, JS Lee Assoc., Inc., 1992.
- [15] T. Rappaport, “Wireless Communications: Principles and Practice, 2nd ed,” Upper Saddle River, NJ, USA: Prentice Hall PTR, 2001.
- [16] M. Lott and I. Forkel, “A multi-wall-and-floor model for indoor radio propagation,” IEEE VTS 53rd Vehicular Technology Conf., Proc. (Cat. No.01CH37202), Vol.1, pp. 464-468, 2001.
- [17] Recommendation ITU-R P.1238-1 Data, “P.1238: Propagation data and prediction methods for the planning of indoor radiocommunication systems and radio local area networks in the frequency range 300 MHz to 100 GHz,” 2015.
- [18] Z. Zhong, P. Kulkarni, F. Cao, Z. Fan, and S. Armour, “Issues and challenges in dense WiFi networks,” 2015 Int. Wireless Communications and Mobile Computing Conference (IWCMC), pp. 947-951, 2015.
- [19] B. Li, J. Salter, A. Dempster, and C. Rizos, “Indoor positioning techniques based on wireless LAN,” First IEEE Int. Conf. on Wireless Broadband and Ultra Wideband Communications, pp. 13-16, 2006.
- [20] G. Jekabsons, V. Kairish, and V. Zuravlyov, “An Analysis of Wi-Fi Based Indoor Positioning Accuracy,” Sci. J. Riga Tech. Univ. Comput. Sci., Vol.44, No.1, Jan. 2011.
- [21] J. Bardwell and D. Akin, “CWNA: Certified Wireless Network Administrator: Official Study Guide: (exam PWO-100),” McGraw-Hill/Osborne, p. 418, 2005.
- [22] A. Chella, G. Lo Re, I. Macaluso, M. Ortolani, and D. Peri, “A Networking Framework for Multi-Robot Coordination,” Recent Adv. Multi Robot Syst., pp. 1-14, May 2008.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.