Paper:
Planning of Movements of Building Robots with Speed Optimization
Thomas Bock* and Alexey Bulgakov**
*Technical University Munich
St. Arcis 21, 80333 Munich, Germany
**Southwest State University
St. 50. Let October 94, 305040 Kursk, Russia

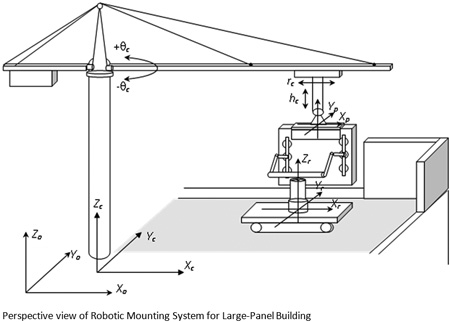
Perspective view of robotic mounting system for large-panel building
- [1] T. Bock, A. Bulgakov, and D. Parshin, “Automation and robotization of mounting operations in building,” 18th Int. Symposium on Automation and Robotics in Construction, pp. 11-14, Krakow, 2001.
- [2] T. Bock, A. Bulgakov, and R. Neudorf, “Computer technologies in construction robots control,” 19th Int. Symposium on Automation and Robotics in Construction, pp. 501-504, Washington, 2002.
- [3] T. Bock, A. Bulgakov, and D. Parshin, “Motion planning of mounting robots with intelligent control,” 20th Int. Symposium on Automation and Robotics in Construction, pp. 127-130, Eindhoven, 2003.
- [4] T. Bock, A. Bulgakov, D. Parshin, and S. Tkachev, “Robotic mounting system for large-panel building,” 21th Int. Symposium on Automation and Robotics in Construction, pp. 172-180, Seoul, 2004.
- [5] Y. Xiao, K. Zhu, and H. C. Liaw, “Generalized synchronization control of multi-axis motion systems,” Control Engineering Practice, Vol.13 pp. 809-819, 2005.
DOI: 10.1016/j.conengprac.2004.09.005 - [6] A. Bulgakov, D. Parshin, and A. Medvedev, “Integration of management systems for construction holdings on the basis of neuro network coordination,” 51th Int. Science Colloquium, Mechanical engineering from macro to nano, pp. 125-129, Ilmenau, 2006.
- [7] S. Seriani, A. Cortellessa, S. Belfio, M. Sortino, G. Totis, and P. Gallina, “Automatic path-planning algorithm for realistic decorative,” Automation in Construction, Vol.56, pp. 67-75, 2015.
DOI: 10.1016/j.autcon.2015.04.01
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.