Paper:
First Trial of Underwater Excavator Work Supported by Acoustic Video Camera
Taketsugu Hirabayashi, Kazuki Abukawa, Tomoo Sato, Sayuri Matsumoto, and Muneo Yoshie
Port and Airport Research Institute
3-1-1 Nagase, Yokosuka, Kanagawa 239-0826, Japan

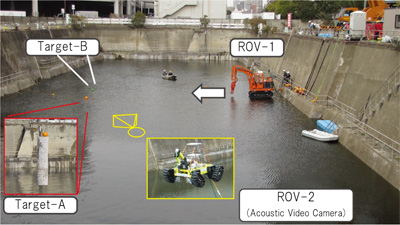
The experiment of recognition by acoustic video camera
- [1] H. Kaneyama, “Cost-cutting measures with underwater construction machine “underwater excavator: Big Crab”,” Summary of the 16th port technology presentations, 1999 (in Japanese).
- [2] T. Hisatake, “Construction utilizing information and communication technology, and use of radio waves,” Construction machinery and equipment, June 2000 issue, pp. 20-25, 2000 (in Japanese).
- [3] T. Hirabayashi, T. Yamamoto, H. Yano, and H. Iwata, “Experiment on Teleoperation of Underwater Backhoe with Haptic Information,” Int. Symposium on Automation and Robotics in Construction (ISARC2006), pp. 36-41, 2006.
- [4] T. Hirabayashi, H. Yasuta, H. Yano, and H. Iwata, “Evaluation of Operativeness Concerning Interface of Remote Controlled Backhoe,” Int. Symposium on Automation and Robotics in Construction (ISARC2006), pp. 52-55, 2006.
- [5] T. Hirabayashi, J. Akizono, T. Yamamoto, and H. Yano, “Teleoperation of Construction Machines with Haptic Information for Underwater Applications,” An Int. Research J. of Automation In Construction, Vol.15, No.5, pp. 563-570, 2006.
- [6] M. Fujii, “Actual feeling of operating unmanned construction machines in Unzen Fugendake,” Construction machinery and equipment, pp. 40-43, 2000 (in Japanese).
- [7] H. Yamada, K. Takeichi, and T. Muto, “Master-Slave Control for Tele-operation Construction Robot System,” Trans. of the Japan Society of Mechanical Engineers (Edition C), Vol.66, No.651, pp. 140-147, 2000 (in Japanese).
- [8] S. Matsumoto, K. Katakura, N. Yoshizumi, M. Nanri, N. Suzuki, and T. Noguchi, “Prototype Three Dimensional Sonar System for Underwater Acoustic Imaging,” J. Marine Acoust. Soc. Jpn, Vol.36, No.2, pp. 91-94, 2009 (in Japanese).
- [9] S. Matsumoto, K. Katakura, and N. Yoshizumi, “Development of Underwater Three-Dimensional Imaging SONAR System with Acoustic Lens,” Report of the port and airport research institute, Vol.48, No.4, pp. 53-70, 2009 (in Japanese).
- [10] S. Matsumoto, K. Katakura, N. Yoshizumi, K. Nishihira, M. Nanri, N. Takeyama, N. Suzuki, and T. Noguchi, “Development of Three-Dimensional Sonar System for Underwater Acoustic Imaging,” J. Marine Acoust. Soc. Jpn, Vol.37, No.1, pp. 13-24, 2010 (in Japanese).
- [11] T. Noguchi, N. Suzuki, S. Matsumoto, N. Yoshizumi, K. Katakura, and T. Shiraishi, “Development of Four-Dimensional Imaging and Surveying Sonar System with Underwater Acoustic Lens,” Proc. of civil engineering in the ocean, Vol.26, pp. 1293-1298, 2010 (in Japanese).
- [12] S. Matsumoto, N. Yoshizumi, and K. Katakura, “Development of Four-dimensional Wide-angle Imaging and Surveying Sonar,” Report of the port and airport research institute, Vol.50, No.3, pp. 3-41, 2011 (in Japanese).
- [13] K. Katakura, “Acoustic transducer device for investigation of underwater objects,” Japanese Unexamined Patent Application Publication No.Sho47-26160, 1972.
- [14] K. Katakura, Y. Tannaka, M. Kobayashi, and T. Koshikawa, “Underwater Acoustic Imaging by Frequency Controlled Beam Steering,” J. Acoustic. Soc. Jpn, Vol.31, pp. 716-724, 1975 (in Japanese).
- [15] S. Takano, “Proposal of Spherically Acoustic Lens for 3D Imaging SONAR,” J. Marine Acoust. Soc. Jpn, Vol.41, No.1, pp. 26-31, 2014.
- [16] Advanced Construction Technology Center, “Guidebook to emergency unmanned execution,” pp. 14-15, 2001 (in Japanese).
- [17] Y. Yanagisawa, H. Yamamoto, and H. Shao, “Research on a man-machine interface for remote operation of work machinery,” Papers for the symposium of the construction practice and machine, pp. 77-82, 2007 (in Japanese).
- [18] T. Yamaguchi, T. Ishimatsu, and H. Yamamoto, “Research on man-machine interface for remotely-operated construction,” Papers for fiscal 2005 symposium of the construction practice and machine, pp. 145-148, 2005 (in Japanese).
- [19] T. Hirabayashi, “Examination of Information Presentation Method for Teleoperation Excavator,” J. of Robotics and Mechatronics, Vol.24, No.6, pp. 967-976, 2012.
- [20] H. Shao and H. Yamamoto, “Automatic Excavation Planning of Hydraulic Excavator,” Intelligent Robotics and Applications (ICIRA 2008), pp. 1201-1211, 2008.
- [21] Y. Ito and K. Yoshimoto, “Presentation of Movement Parallax on a Fixed Display,” Transactions of the Japan Society of Mechanical Engineers, C, Vol.63, No.613, pp. 3094-3100, 1997 (in Japanese).
- [22] T. Tanimoto, R. Fukano, K. Shinohara, H. Yoshinada, K. Kurashiki, and D. Kondo, “Superimposed Terrain Model on the Operators View Image of Teleoperation,” The 15th Symposium on Construction Robotics in Japan, 2015 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.