Review:
Mechanism and Control of Parallel-Wire Driven System
Hitoshi Kino* and Sadao Kawamura**
*Fukuoka Institute of Technology
3-30-1 Wajiro-higashi, Higashi-ku, Fukuoka 811-0295, Japan
**Ritsumeikan University
1-1-1 Noji-higashi, Kusatsu, Shiga 525-8577, Japan

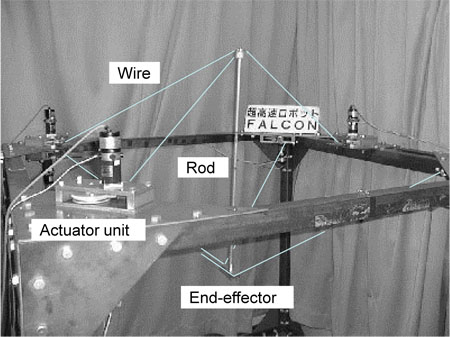 A parallel-wire driven system
A parallel-wire driven system- [1] R. Clavel, “DELTA, a fast robot with parallel geometry,” Proc. Int. Symp. on Industrial Robots, pp. 91-100, 1988.
- [2] F. Pierrot, P. Dauchez, and A. Fournier, “HEXA: a fast six-DOF fully-parallel robot,” Int. Conf. on Advanced Robotics, Vol.2, pp. 1158-1163, 1991.
- [3] M. Uchiyama, “6 d.o.f. parallel robot HEXA,” Advanced Robotics, Vol.8. No.6, p. 601, 1993.
- [4] J. Albus, R. Bostelman, and N. Dagalakis, “The NIST robocrane,” J. Robotic Systems, Vol.10, No.5, pp. 709-724, 1993.
- [5] H. Osumi, T. Arai, and H. Asama, “Development of a Seven Degrees of Freedom Crane with Three Wires (1st Report) – Inverse Kinematics of the Crane –,” J. Japan Society for Precision Engineering, Vol.59, No.5, pp. 767-772, 1993 (in Japanese).
- [6] A. Ming and T. Higuchi, “Study on multiple degree-of-freedom positioning mechanism using wires (part 1) – concept, design and control,” Int. J. Japan Social Engineering, Vol.28, No.2, pp. 131-138, 1994.
- [7] A. Ming and T. Higuchi, “Study on multiple degree-of-freedom positioning mechanism using wires (part 2) – development of a planar completely restrained positioning mechanism,” Int. J. Japan Social Engineering, Vol.28, No.3, pp. 235-242, 1994.
- [8] R. Lindemann and D. Tesar, “Construction and Demonstration of a 9-String 6-DOF Force Reflecting Joystick for Telerobotics,” Proc. NASA conf. Space Telerobotics, Vol.4, pp. 55-63, 1989.
- [9] Y. Hirata and M. Sato, “3-Dimensional Interface Device for Virtual Work Space,” Proc. Int. Conf. on Intelligent Robots and Systems, Vol.2, pp. 889-896, 1992.
- [10] S. Kawamura and K. Itoh, “New Type Master Robot for Teleoperation Using A Radial Wire Drive System,” Proc. of Int. Conf. on Intelligent Robots and Systems, Vol.1, pp. 55-60, 1993.
- [11] X. Tang, “An Overview of the Development for Cable-Driven Parallel Manipulator,” Advances in Mechanical Engineering, Vol.2014, pp. 1-9, 2014.
- [12] Y. D. Patel and P. M. George, “Parallel Manipulators Applications – A Survey,” Modern Mechanical Engineering, No.2, pp. 57-64, 2012.
- [13] T. Bruckmann and A. Pott (Eds.), “Cable-Driven Parallel Robots (Mechanisms and Machine Science 12),” Springer-Verlag Berlin Heidelberg, 2013.
- [14] A. Pott and T. Bruckmann (Eds.), “Cable-Driven Parallel Robots: Proceedings of the Second International Conference on Cable-Driven Parallel Robots (Mechanisms and Machine Science 32),” Springer Int. Publishing Switzerland, 2015.
- [15] V. D. Nguyen, “Constructing Force-Closure Grasp in 3D,” Proc. of Int. Conf. on Robotics and Automation, Vol.4, pp. 240-245, 1987.
- [16] M. Yamamoto, N. Yanai, and A. Mohri, “Inverse dynamics and control of crane-type manipulator,” Proc. Int. Conf. Intelligent Robots and Systems, Vol.2, pp. 1228-1233, 1999.
- [17] M. Yamamoto, N. Yanai, and A. Mohri, “Trajectory Control of Incompletely Restrained Parallel-Wire-Suspended Mechanism Based on Inverse Dynamics,” Trans. on Robotics, Vol.20, No.5, pp. 840-850, 2004.
- [18] M. Yamamoto, A. Mohri, and N. Yanai, “Forward and Inverse Kinematics Calculation for Incompletely Restrained Type Parallel Wire Mechanism,” J. Robotics Society of Japan, Vol.20, No.1, pp. 107-115, 2002 (in Japanese).
- [19] S. Kawamura, H. Kino, and W. Choe, “High speed manipulation by using parallel wire driven robots,” ROBOTICA, Vol.18, part 1, pp. 13-21, 2000.
- [20] T. Morizono, K. Kurahashi, and S. Kawamura, “Analysis and control of a force display system driven by parallel wire mechanism,” ROBOTICA, Vol.16, No.5, pp. 551-563, 1998.
- [21] W. Choe, H. Kino, K. Katsuta, and S.Kawamura, “A design of parallel wire driven robots for ultrahigh speed motion based on stiffness analysis,” Proc. of The JAPAN-USA Symposium on Flexible Automation, Vol.1, pp. 159-166, 1996.
- [22] H. Kino, H. Miyazono, W. Choe, and S.Kawamura, “Realization of large work space using parallel wire drive robots,” Proc. of Asian Control Conf., Vol.3, pp. 591-594, 1997.
- [23] S. Taniguchi, H. Kino, R. Ozawa, R. Ishibashi, M. Uemura, K. Kanaoka, and S. Kawamura, “Inverse Dynamics of Human Passive Motion Based on Iterative Learning Control,” Trans. on Systems, Man, and Cybernetics, part A, Vol.42, No.2, pp. 307-315, 2012.
- [24] K. Maeda, S. Tadokoro, T. Takamori, M. Hiller, and R. Verhoeven, “On design of a redundant wire-driven parallel robot WARP manipulator,” Proc. Int. Conf. Robotics and Automation, Vol.2, pp. 895-900, 1999.
- [25] H. Kino, T. Yahiro, F. Takemura, and T. Morizono, “Robust PD Control Using Adaptive Compensation For Completely Restrained Parallel-wire Driven Robots: Translational Systems Using the Minimum Number of Wires Under Zero-gravity Condition,” Trans. on Robotics, Vol.23, No.4, pp. 803-812, 2007.
- [26] H. Kino, T. Yahiro, S. Taniguchi, and K. Tahara, “Sensorless Position Control Using Feedforward Internal Force for Completely Restrained Parallel-wire Driven Systems,” Trans. on Robotics, Vol.25, No.2, pp. 467-474, 2009.
- [27] P. D. Campbell, P. L. Swaim, and C. J. Thompson, “Charlotte Robot Technology for Space and Terrestrial Applications,” Proc. Int. Conf. Environmental System, Article 951520, 1995.
- [28] M. A. Adli, K. Nagai, K. Miyata, and H. Hanafusa, “Analysis of Internal Force Effect in Parallel Manipulators,” Trans. Society of Instrument and Control Engineers, Vol.27, No.11, pp. 1266-1273, 1991.
- [29] F. Takemura, M. Enomoto, K. Denou, K. Erbatur, U. Zwiers, and S. Tadokoro, “A human body searching strategy using a cable-driven robot with an electromagnetic wave direction finder at major disasters,” Advanced Robotics, Vol.19, No.3, pp. 331-347, 2005.
- [30] F. Takemura, M. Enomoto, T. Tanaka, K. Denou, Y. Kobayashi, and S. Tadokoro, “Development of the balloon-cable driven robot for information collection from sky and proposal of the search strategy at a major disaster,” Proc. Int. Conf. Advanced Intelligent Mechatronics, pp. 658-663, 2005.
- [31] K. Homma and T. Arai, “Design of an upper limb motion assist system with parallel mechanism,” Proc. Int. Conf. Robotics and Automation, Vol.2, pp. 1302-1307, 1995.
- [32] K. Homma, O. Fukuda, J. Sugawara, Y. Nagata, and M. Usada, “A Wire-driven Leg Rehabilitation System: Development of a 4-DOF Experimental System,” Proc. Int. Conf. Advanced Intelligent Mechatronics, Vol.2, pp. 908-913, 2003.
- [33] H. Kino, K. Saisho, T. Miyazoe, and S. Kawamura, “Parallel Wire Driven System for Joint Torque Estimation of Human Leg in Passive Motion,” J. Control, Measurement, and System Integration, Vol.5, No.2, pp. 70-77, 2012.
- [34] Y. Cheng, G. Ren, and S. Dai, “The multi-body system modelling of the Gough-Stewart platform for vibration control,” J. Sound and Vibration, Vol.271, pp. 559-614, 2004.
- [35] R. Yao, X. Tang, J. Wang, and P. Huang, “Dimensional optimization design of the four-cable-driven parallel manipulator in FAST,” Trans. on Mechatronics, Vol.15, No.6, pp. 932-941, 2010.
- [36] Y. Shen, M. Osumi, and T. Arai, “Manipulability measures for multi-wire driven parallel mechanisms,” Proc. Int. Conf. on Industrial Technology, pp. 550-554, 1994.
- [37] R. Kurtz and V. Hayward, “Dexterity measure for tendon actuated parallel mechanisms,” Proc. Int. Conf. on Advanced Robotics, Vol.2, pp. 1141-1146, 1991.
- [38] S. Arimoto, “Control Theory of Non-linear Mechanical Systems – A passivity-based and circuit-theoretic approach (Oxford Engineering Science Series 49),” Oxford University Press, New York, 1996.
- [39] H. Kino, “Principle of Orthogonalization for Completely Restrained Parallel Wire Driven Robot,” Proc. Int. Conf. Advanced Intelligent Mechatronics, pp. 509-514, 2003.
- [40] H. Kino, S. Yabe, C. C. Cheah, S. Kawamura, and S. Arimoto, “A Motion Control Scheme in Task Oriented Coordinates and its Robustness for Parallel Wire Driven Systems,” J. Robotics Society of Japan, Vol.18, No.3, pp. 411-418, 2000 (in Japanese).
- [41] G. Rosati, M. Andreolli, A. Biondi, and P. Gallina, “Performance of Cable Suspended Robots for upper Limb Rehabilitation,” Proc. Int. Conf. on Rehabilitation Robotics, pp. 385-392, 2007.
- [42] Y. Li and Q. Xu, “Design and Development of a Medical Parallel Robot for Cardiopulmonary Resuscitation,” Trans. on Mechatronics, Vol.12, No.3, pp. 265-273, 2007.
- [43] R. Ishibashi, T. Oda, K. Tahara, H. Kino, and A. Kojima, “Parallel system using V-Shaped shape memory alloy actuator,” Proc. of the SICE Annual Conf., pp. 1745-1750, 2012.
- [44] R. Ishibashi, H. Ochi, T. Oda, R. Okuda, K. Umeda, K. Tahara, H. Kino, and A. Kojima, “A Proposal of a SMA actuated wing mechanism using flexible structure for the capability of various flow speeds,” Proc. of Int. Conf. on Robotics and Biomimetics, pp. 2673-2678, 2014.
- [45] W. Choe, Y. Uchikura, S. Kawamura, and H. Kobayashi, “Development of Traversing System for Anemometer using Parallel Type Wire Driven Mechanism,” J. Japan Association for Wind Engineering, No.74, pp. 25-33, 1998.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.