Paper:
Using a Low-Cost Onboard Camera for Sliding Mode Control of a Mobile Robot in Slippery Environments
Ernesto Rivas*, Koutaro Komagome*, Kazuhisa Mitobe*, and Genci Capi**
*Department of Mechanical Systems Engineering, Yamagata University
4-3-16 Jonan, Yonezawa, Yamagata 992-8510, Japan
**Department of Electric and Electronic Systems Engineering, University of Toyama
3190 Gofuku, Toyama 930-8555, Japan

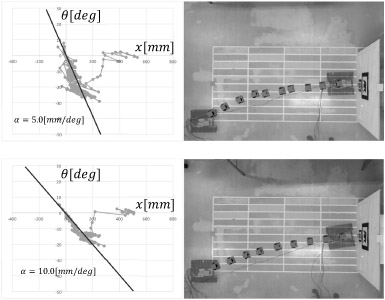 Robot motion on sliding mode
Robot motion on sliding mode- [1] K. Mitobe, E. Rivas, K. Hasegawa, R. Kasamatsu, S. Nakajima, and H. Ono, “Development of the Snow Dragging Mechanism for an Autonomous Snow Eater Robot,” IEEE/SICE Int. Symposium on System Integration, 2010.
- [2] E. Rivas and K. Mitobe, “Development of a Navigation System for The SnowEater Robot,” IEEE/SICE Int. Symposium on System Integration, 2012.
- [3] J. H. Lever, D. Denton, G. E. Phetteplace, S. D. Wood, and S. A. Shoop, “Mobility of a lightweight tracked robot over deep snow,” J. of Terramechanics Vol.43, pp. 527-551, 2006.
- [4] J. H. Lever, S. A. Shoop, and R. I. Bernhard, “Design of lightweight robots for over-snow mobility,” J. of Terramechanics, Vol.46, pp. 67-74, 2009.
- [5] ““Yuki-Taro” the autonomous snowplow, Report on the Prototype Robot Exhibition EXPO 2005 AICHI,” Niigata Industrial Creation Organization, 2005 (in Japanese).
- [6] T. Sato, T. Makino, K. Naruse, H. Yokoi, and Y. Kakazu, “A Study on Development of the Autonomous Snowplow with Remote Control,” presented at RoboMec 2003 (in Japanese).
- [7] J. Y. Wong, “Theory of ground vehicles,” 4th Edition, Jhon Wiley & Sons, Inc., Chapter 6, Steering of tracked vehiclesi, pp. 419-449, 2008.
- [8] J. Y. Wong and W. Huang, ““Wheels vs. Tracks”– A fundamental evaluation from the traction perspective,” J. of Terramechanics, Vol.43, pp. 27-42, 2006.
- [9] C. Canudas, B. Siciliano, and G. Bastin, “Theory of Robot Control. 1st Edition,” Chapter 7, Modelling and structural properties, pp. 278, Chapter 9, Nonlinear feedback control, pp. 331-341, 1997.
- [10] D. Pebrianti, W. Wang, D. Iwakura, Y. Song, and K. Nonami, “Sliding Mode Controller for Stereo Vision Based Autonomous Flight of Quad-Rotor MAV,” J. of Robotics and Mechatronics, Vol.23, No.1, 2011.
- [11] M. F. B. Abas, D. Pebrianti, S. A. M. Ali, D. Iwakura, Y. Song, K. Nonami, and D. Fujiwara, “Circular Leader-Follower Formation Control of Quad-Rotor Aerial Vehicles,” J. of Robotics and Mechatronics, Vol.25, No.1, 2013.
- [12] A. Mokhtari, A. Benallegue, and A. Belaidi, “Polynomial Linear Quadratic Gaussian and Sliding Mode Observer for a Quadrotor Unmanned Aerial Vehicle,” J. of Robotics and Mechatronics, Vol.17, No.4, 2005.
- [13] C. Wit, H. Khennouf, C. Samson, and O. Sordalen, “Nonlinear control design for mobile robots,” Recent Trends in Mobile Robots, Chapter 5, World Scientific series in robotics and automated systems, World Scientific, 1993.
- [14] J. Guldner and V. I. Utkin, “Stabilization of nonholonomic mobile robots using LyapuNo.functions for navigation and sliding mode control,” Proc. IEEE Int. Conf. Decision Contr., pp. 2967-2972, 1994.
- [15] J. M. Yang and J. H. Kim, “Sliding Mode Control for Trajectory Tracking of Nonholonomic Wheeled Mobile Robots,” IEEE Trans. on Robotics and Automation, Vol.15, No.3, 1999.
- [16] M. L. Corradini, T. Leo, and G. Orlando, “Experimental Testing of a Discrete-Time Sliding Mode Controller for Trajectory Tracking of a Wheeled Mobile Robot in the Presence of Skidding Effects,” J. of Robotic Systems Vol.19, No.3, pp. 177-188, 2002.
- [17] R. Solea, A. Filipescu, and G. Stamatescu, “Sliding-mode real-time mobile platform control in the presence of uncertainties,” Joint 48th IEEE Conf. on Decision and Control and 28th Chinese Control Conf., 2009.
- [18] M. Spong and M. Vidyasagar, “Robot Dynamics and Control,” Wiley, 1989.
- [19] H. Kato and M. Billinghurst, “Marker tracking and HMD calibration for a video-based augmented reality conferencing system,” Proc. 2nd IEEE and ACM Int. Workshop on Augmented Reality, 1999.
- [20] E. Rivas, K. Komagome, K. Mitobe, and G. Capi, “Image-Based Navigation for the SnowEater Robot Using a Low-Resolution USB Camera,” Robotics, Vol.4, pp. 120-140, 2015.
- [21] J. Slotine and W. Li, “Applied Nonlinear Control,” Prentice Hall, 1991.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.