Paper:
Flexible Parallel Link Mechanism Using Tube-Type Dielectric Elastomer Actuators
Changan Jiang*1,*4, Kentaro Takagi*2, Shinya Hirano*1, Tatsuya Suzuki*2, Shigeyuki Hosoe*1, Kazunobu Hashimoto*3, and Akitoshi Nozawa*3
*1RIKEN-SRK Collaboration Center for Human-Interactive Robot Research, RIKEN
2271-130 Anagahora, Shimoshidami, Moriyama-ku, Nagoya 463-0003, Japan
*2Department of Mechanical Science and Engineering, Nagoya University
Furo-cho, Chikusa-ku, Nagoya 464-8603, Japan
*3Sumitomo Riko Company Limited
3-1 Higashi, Komaki 485-0831, Japan
*4Department of Mechanical Engineering, Ritsumeikan University
1-1-1 Noji-Higashi, Kusatsu 525-8577, Japan

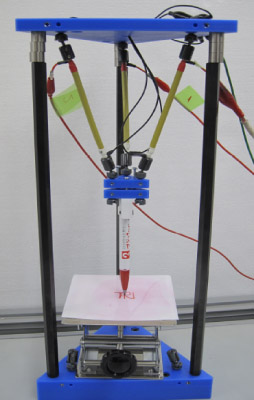
Tube-type DEA based mechanism
- [1] J. P. Merlet, “Parallel robots,” London: Kluwe Academic Publishers, 2000.
- [2] Y. Takeda, K. Kamiyama, Y. Maki, M. Higuchi, and K. Sugimoto, “Development of Position-Orientation Decoupled Spatial In-Parallel Actuated Mechanisms with Six Degrees of Freedom,” J. of Robotics and Mechatronics, Vol.17, No.1, pp. 59-68, 2005.
- [3] T. Onodera, E. Suzuki, M. Ding, H. Takemura, and H. Mizoguchi, “Force, Stiffness and Viscous Damping Control of a Stewart-Platform-Type Ankle-Foot Rehabilitation Assist Device with Pneumatic Actuator,” J. of Robotics and Mechatronics, Vol.25, No.6, pp. 897-905, 2013.
- [4] K. Lee and D. K. Shah, “Kinematic analysis of a three-degrees-of-freedom in-parallel actuated manipulator,” IEEE J. of Robotics and Automation, Vol.4, No.3, pp. 354-360, 1988.
- [5] G. Pfreundschuh, V. Kumar, and T. Sugar, “Design and control of a 3 DOF in-parallel actuated manipulator,” Proc. of the 1991 IEEE Int. Conf. on Robotics and Automation, pp. 1659-1664, 2003.
- [6] D. Zhao, Y. Xia, H. Yamada, and T. Muto, “Control method for realistic motion in a construction tele-robotic system with a 3-DOF parallel mechanism,” J. of Robotics and Mechatronics, Vol.15, No.4, pp. 361-368, 2003.
- [7] Y. Li and Q. Xu, “Kinematic analysis of a 3-PRS parallel manipulator,” Robotics and Computer-Integrated Manufacturing, Vol.23, No.4, pp. 395-408, 2007.
- [8] R. Pelrine, R. Kornbluh, Q. Pei, S. Stanford, S. Oh, J. Eckerle, R. Full, M. Rosenthal, and K. Meijer, “Dielectric elastomer artificial muscle actuators: toward biomimetic motion,” Proc. of SPIE Smart Structures and Materials, Electroactive Polymer Actuators and Devices (EAPAD), Vol.4695, pp. 126-137, 2002.
- [9] Y. Bar-Cohen, “Electroactive Polymer (EAP) Actuators as Artificial Muscles-Reality, Potential, and Challenges,” SPIE Press, 2004.
- [10] K. J. Kim and S. Tadokoro, “Electroactive Polymers for Robotic Applications: Artificial Muscles and Sensors,” Springer, 2007.
- [11] A. O’ Halloran, F. O’ Malley, and P. McHugh, “A review on dielectric elastomer actuator, technology, applications and challenges,” J. of Applied Physics, Vol.104, No.7, 071101, 2008.
- [12] C. Jiang, K. Takagi, T. Suzuki, S. Hosoe, A. Nozawa, and K. Hashimoto, “Experimental study of position control with tube-type dielectric elastomer actuator,” Proc. of the 2013 Int. Conf. on Advanced Mechatronic Systems, pp. 352-356, 2013.
- [13] C. Jiang, K. Takagi, S. Hirano, T. Suzuki, S. Hosoe, K. Hashimoto, and A. Nozawa, “Kinematics analysis for tube-type DEAs based parallel link mechanism,” Proc. of the 2014 Int. Conf. on Advanced Mechatronic Systems, pp. 32-36, 2014.
- [14] J. Nocedal and S. J. Wright, “Numerical Optimization,” Springer Series in Operations Research, Springer-Verlag, New York, 1999.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.