Paper:
3D Dynamic Biped Walker with Flat Feet and Ankle Springs: Passive Gait Analysis and Extension to Active Walking
Tetsuya Kinugasa*, Takashi Ito**, Hiroaki Kitamura*, Kazuhiro Ando*, Shinsaku Fujimoto*, Koji Yoshida*, and Masatsugu Iribe***
*Okayama University of Science
1-1 Ridai-cho, Kita-ku, Okayama 700-0005, Japan
**Chiba Machine Industry Corporation
155-26 Toyofuta, Kashiwa, Chiba 277-0872, Japan
***Osaka Electro-Communication University
18-8 Hatsu-cho, Neyagawa, Osaka 572-8530, Japan

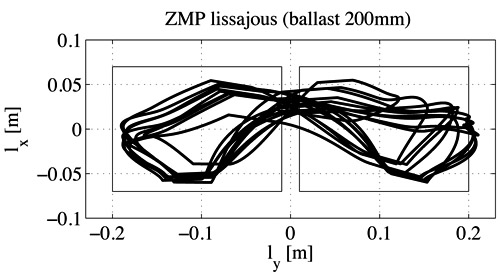 A ZMP pattern of passive walker RW03
A ZMP pattern of passive walker RW03- [1] T. McGeer, “Passive Dynamic Walking,” CSS-IS TR, 88-02, 1988.
- [2] K. Narioka and K. Hosda, “Study on Locomotion of Musculoskeletal Humanoid,” J. of Robotics Society of Japan, Vol.30, No.1, pp. 8-13, 2012.
- [3] M. Wisse et al., “Ankle springs instead of arc-shaped feet for passive dynamic walkers,” Proc. of HUMANOIDS 06, pp. 110-116, 2006.
- [4] T. Kinugasa et al., “3D Passive Walker with Sprung Ankle Springs and Flat Foot: A design method by natural frequency index without yaw and roll compensator,” Proc. of 2008 JSME Conf. on Robotics and Mechatronics, 1P1-B12, 2008.
- [5] T. Kinugasa et al., “3D Passive Walker with Ankle Springs and Flat Feet,” J. of Robotics Society of Japan, Vol.27, No.10, pp. 1169-1172, 2009.
- [6] T. Kinugasa and K. Yoshida, “3D Passive Dynamic Walkers with Flat Feet and Ankle Springs: Experiment and Analysis For Longer and More Stable Step,” Proc. of Int. Symp. on Mobiligence, pp. 425-430, 2009.
- [7] T. Kinugasa et al., “Experimental Analysis of 3D Passive Dynamic Walking: body’s shape, CoM and stability,” Proc. of SICE Annual Conf. 2010, pp. 1825-1830, 2010.
- [8] K. Yokoyama et al., “Experimental Study of 3D Passive Biped Robot with Flat Feet and Ankle Springs,” Proc. of The 26th Annual Conf. of RSJ, RSJ2008AC3B1-02, 2008.
- [9] T. Narukawa et al., “Design and Construction of a Simple 3D Straight-Legged Passive Walker with Flat Feet and Ankle Springs,” J. of System Design and Dynamics, Vol.3, No.1, pp. 1-12, 2009.
- [10] S. H. Collins, M. Wisse, and A. Ruina, “A Three-Dimensional Passive-Dynamic Walking Robot with Two Legs and Knees,” Int. J. of Robotics Research, Vol.20, No.2, pp. 607-615, 2001.
- [11] K. Hyodo et al., “Outdoor Environments Walking by Biped Passive Dynamic Walker with Constraint Mechanism,” J. of Robotics and Mechatronics, Vol.22, No.3, pp. 363-370, 2010.
- [12] K. Narioka and K. Hosoda, “Designing synergistic walking of a whole-body humanoid driven by pneumatic artificial muscles: An empirical study,” Advanced Robotics, Vol.22, No.10, pp. 1107-1123, 2008.
- [13] K. Hosoda et al., “Biped Robot Design Powered by Antagonistic Pneumatic Actuators for Multi-Modal Locomotion,” Robotics and Autonomous Systems, Vol.56, No.1, pp. 46-53, 2008.
- [14] R. Ito et al., “An Experimental Study of Pseudo Passive Locomotion,” The 19th Annual Conf. of the robotics Society of Japan, pp. 835-836, 2001.
- [15] K. Ono et al., “Self-excited walking of a biped mechanism,” Int. J. of Robotics Research, Vol.23, No.1, pp. 55-68, 2004.
- [16] F. Asano and Z. Ruo, “Parametrically Excited Dynamic Walking Control of Telescopic Legged Robot,” J. of Robotics Society of Japan, Vol.23, No.7, pp. 144-152, 2005.
- [17] T. Kinugasa et al., “Biped Walking by Variations of Knee Lengths and Attitude Control of a Body and its Frequency Analysis,” J. of Robotics Society of Japan, Vol.25, No.3, pp. 440-447, 2007.
- [18] T. Kinugasa et al., “Frequency Analysis for Biped Walking via Leg Length Variation,” J. of Robotics and Mechatronics, Vol.20, No.1, 2008.
- [19] I. Hamamoto et al., “Development of Flexible Displacement Sensor Using Nylon String Coated with Carbon and Its Application for McKibben Actuator,” Proc. Of SICE/ICASE Int. Joint Conf. 2006, pp. 1943-1946, 2006.
- [20] S. Nishiyama et al., “Estimation of zero moment point trajectory during human gait locomotion based on a three-dimensional rigid-link model,” Technical report of IECE, Vol.101, No.734, pp. 59-64, 2002.
- [21] R. Pfeifer and J. Bongard, “How the body shapes the way we think: a new view of intelligence,” MIT press, 2007.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.