Paper:
Impact Piezo-Driven Micro Dispenser and Precise Miniature XY Stage
Yuuka Irie*, Shinnosuke Hirata**, Chisato Kanamori*, and Hisayuki Aoyama*
*Department of Mechanical Engineering and Intelligent Systems, The University of Electro-Communications
1-5-1 Chofugaoka, Chofu, Tokyo 182-8585, Japan
**Department of Mechanical and Control Engineering, Tokyo Institute of Technology
S5-17, 2-12-1 Ookayama, Meguro-ku, Tokyo 152-8552, Japan

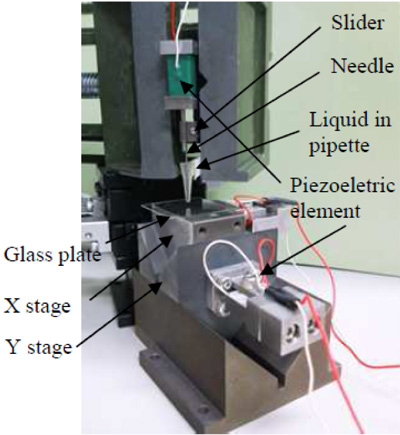
Micro dispense mechanism
- [1] T. Imai, “Printed Electronics,” Fujikura Technical Review, Vol.2, pp. 63-66, 2012.
- [2] K. Suzuki, K. Tsuji, A. Onodera, and T. Shibuya, “High-resolution Patterning Technologies using Ink-jet Printing and Laser Processing for Organic TFT Array,” Society for imaging science and technology, NIP 29 and Digital Fabrication 2013, pp. 489-493, 2013.
- [3] R. Yalla, K. P. Nayak, and K. Hakuta, “Fluorescence photon measurements from single quantum dots on an optical nanofiber,” OPTICS EXPRESS, Vol.20, No.3, pp. 2932-2941, 2012.
- [4] K. Suganuma, T. Kanzawa, D. Goto, J. Narui, and T. Otsuki, “Development of Printable Electronics for Circuit Formation,” Fujitsu Ten Technical J., pp. 37-39, 2012.
- [5] T. Seto, K. Takagi, K. Yoshida, J.-H. Park, and S. Yokota, “Development of High-Power Micropump Using Inertia Effect of Fluid for Small-Sized Fluid Actuators,” J. of Robotics and Mechatronics, Vol.15, No.2, pp. 128-135, 2003.
- [6] K. Yamamoto, H. Otaki, and Y. Ishikawa, “Moving mechanism using inertia,” The Japan Society of Mechanical Engineers, Vol.57, pp. 1854-1859, 1991.
- [7] H. Isobe, S. Kato, A. Kyusojin, and T. Moriguti, “Development of piezoelectric XYγ positioning device using impulsive force (2nd report) – Improvement of motion characteristic with friction control –,” The Japan Society of Precision Engineering, Vol.64, No.3, pp. 408-412, 1998.
- [8] Y. Nomura and H. Aoyama, “Development of Inertia Driven Micro Robot with Nano Tilting Stage for SEM Operation,” Proc. of ASME/JSME Joint Conf. on Micromechanics for Information and Precision Equipment (MIPE 2006), 2006.
- [9] M. Takizawa, Y. Irie, S. Hirata, and H. Aoyama, “Development of hemispherical manipulator and self-walking stage using piezoelectric actuator,” 3rd Int. Conf. of Asian Society for Precision Engineering and Nanotechnology (ASPEN2009), Station Hotel Kokura, p. 1E6, 2009.
- [10] H. Shiratori, M. Takizawa, Y. Irie, S. Hirata, and H. Aoyama, “Development of the Miniature Hemispherical Tilt Stage Driven by Stick-slip Motion using Piezoelectric Actuators,” Mecatronics-REM2012, France, 2012.
- [11] T. Higuchi and Y. Yamagata, “Micro robot arm utilizing rapid deformations of piezoelectric elements,” J. of Robotics and Mechatronics, Vol.1, No.4, pp. 94-99, 1989.
- [12] K. Uchino, “Piezoelectric actuators 2006 Expansion from IT/robotics to ecological/energy applications,” J. Electroceram, Vol.20, pp. 301-311, 2008.
- [13] Y. Tadano, R. Yoshida, and T, Morita, “Simulation modeling for resonance-type SIDM actuator,” The Japan Society of Precision Engineering, pp. 183-184, 2013.
- [14] NEC/TOKIN, “Multilayers piezoelectric actuators, Vol.07,” Product catalog, p. 11.
- [15] Y. Irie, J. Kubo, T. Fujioka, H. Aoyama, and T. Usuda, “Piezo-impact-driven X-Y stage and precise sample holder for accurate microlens alignment,” J. of Rbotics and Mechatronics, Vol.21, No.5, pp. 635-641, 2009.
- [16] S. Hirata, K. Hirose, Y. Irie, and H. Aoyama, “Evaluation of micro-gap control of the needle-type dispenser for precise micro-droplet dispensation,” J. of Robotics and Mechatronics, Vol.25, No.5 pp. 848-854, 2013.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.