Development Report:
Views over last 60 days: 1,775
Unobtrusive Tremor Detection While Gesture Controlling a Robotic Arm
Jörg Güttler, Dany Bassily, Christos Georgoulas, Thomas Linner, and Thomas Bock
Chair of Building Realization and Robotics, Technische Universität München, Germany
Received:July 1, 2014Accepted:September 9, 2014Published:February 20, 2015
Keywords:Fourier analysis, tremor detection, leap motion controller, ageing diseases
Abstract
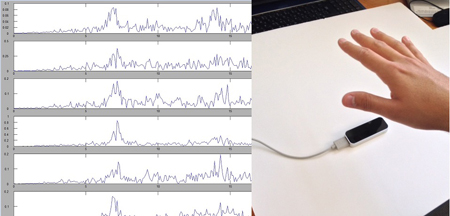
Gesture based validation
Cite this article as:J. Güttler, D. Bassily, C. Georgoulas, T. Linner, and T. Bock, “Unobtrusive Tremor Detection While Gesture Controlling a Robotic Arm,” J. Robot. Mechatron., Vol.27 No.1, pp. 103-104, 2015.Data files:
References- [1] F. Weichert, D. Bachmann, B. Rudak, and D. Fisseler, “Analysis of the accuracy and robustness of the leap motion controller,” Sensors, Vol.13, No.5, pp. 6380-6393, 2013.
- [2] D. Bassily, C. Georgoulas, J. Guettler, T. Linner, and T. Bock, “Intuitive and Adaptive Robotic Arm Manipulation using the Leap Motion Controller,” Proc. of the 45th Int. Symposium on Robotics (ISR 2014) and the 8th German Conf. on Robotics (ROBOTIK 2014), Munich, Germany, June 2-3, pp. 78-84, 2014.
