Paper:
A Control Method for a Swarm of Plant Pot Robots that Uses Artificial Potential Fields for Effective Utilization of Sunlight
Masato Yuasa and Ikuo Mizuuchi
Department of Mechanical Systems Engineering, Tokyo University of Agriculture and Technology, 2-24-16 Nakacho, Koganei, Tokyo 184-8588, Japan

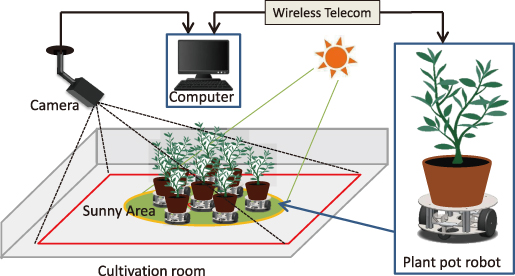 Plant pot robots “Plantroid”
Plant pot robots “Plantroid”- [1] K. Ohyama and T. Kozai, “Estimating electric energy consumption and its cost in a transplant production factory with artificial lighting: A case study,” J. of Society of High Technology in Agriculture, Vol.10, pp. 96-107, 1988.
- [2] T.Morimoto, T. Torii, and Y. Hashimoto, “Optimal control of physiological processes of plants in a green plantfactory,” Control Engineering Practice, Vol.3, No.4, pp. 505-511, 1995.
- [3] K. Ohyama and T. Kozai, “A Closed Transplant Production System, A Hybrid of Scaled-up Micropropagation System and Plant Factory,” J. Plant Biotechnology, Vol.3, No.2, pp. 59-66, 2001.
- [4] Y. Hashimoto, H. Murase, T. Morimoto, and T. Torii, “Intelligent Systems for Agriculture in Japan,” IEEE Control System Magazine, Vol.21, No.5, pp. 71-85, 2001.
- [5] S. Hayashi, K. Shigematsu, S. Yamamoto, K. Kobayashi, Y. Kohno, J. Kamata, and M. Kurita, “Evaluation of a strawberry-harvesting robot in a field test,” Biosystems Engineering, Vol.105, Issue 2, pp. 160-171, 2010.
- [6] A. Kawakami and K. Tsukada, “PotPet: pet-like flowerpot robot,” TEI ’11 Proc. of the fifth Int. Conf. on Tangible, embedded, and embodied interaction, pp. 263-264, 2011.
- [7] O. Khatib, “Real-Time Obstacle Avoidance for Manipulators and Mobile Robots,” Int. J. Robot. Res., Vol.5, No.1, pp. 90-98, 1986.
- [8] Y. Koren and J. Borenstein, “Potential Field Methods and Their Inherent Limitations for Mobile Robot Navigation,” in Proc. of the IEEE Int. Conf. on Robotics and Automation, pp. 1398-1404, 1991.
- [9] K. Sato, “Deadlock-free motion planning using the Laplace potential field,” Advanced Robotics, Vol.7, No.5, pp. 449-461, 1993.
- [10] M. H. Mabrouk and C. R. McInnes, “Solving the potential field local minimum problem using internal agent states,” Robotics and Autonomous Systems, Vol.56, Issue 12, pp. 1050-1060, 2008.
- [11] S. J. Kima, D. J. Yua, T.-C. Kimb, and H. J. Leea, “Growth and photosynthetic characteristics of blueberry (Vaccinium corymbosum cv. Bluecrop) under various shade levels,” Scientia Horticulturae, pp. 486-492, 2011.
- [12] W. Yamori, K. Noguchi, and I. Terashima, “Temperature acclimation of photosynthesis in spinach leaves: analyses of photosynthetic components and temperature dependencies of photosynthetic partial reactions,” Plant, Cell & Environment, Vol.28, Issue 4, pp. 536-547, 2005.
- [13] J. Borenstein and Y. Koren “Real-time obstacle avoidance for fast mobile robots,” IEEE Trans. Syst., Man, Cybern., Vol.19, pp. 1179-1187, 1989.
- [14] Y. Koren and J. Borenstein, “Potential Field Methods and Their Inherent Limitations for Mobile Robot Navigation,” in Proc. IEEE Conf. Robotics and Automation, pp. 1398-1404, 1991.
- [15] S. S. Ge and Y. J. Cui, “New Potential Functions for Mobile Robot Path Planning,” IEEE Trans. on Robotics and Automation, Vol.16, No.5, 2000.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.