Review:
Technology of Unmanned Construction System in Japan
Kazuhiro Chayama*1, Akira Fujioka*2, Kenji Kawashima*3,
Hiroshi Yamamoto*4,Yasushi Nitta*5, Chikao Ueki*6,
Atsushi Yamashita*7, and Hajime Asama*7
*1Kokankyo Engineering Corporation, 4-30-3 Sendagaya, Sibuya, Tokyo 151-0015, Japan
*2Civil Engineering Technology Department, Construction Division, Fujita Corporation, 4-25-2 Sendagaya, Sibuya, Tokyo 151-8570, Japan
*3Tokyo Medical and Dental University, 2-3-10 Kanda-Surugadai, Chiyoda, Tokyo 101-0062, Japan
*4Kanto Technology Development Office, Ministry of Land, Infrastructure, Transport and Tourism (MLIT), 6-12-1 Gokou-Nishi, Matsudo, Chiba 270-2218, Japan
*5Matsue National Highway office, Ministry of Land, Infrastructure, Transport and Tourism (MLIT), 2-6-28 Nishitsuda, Matsue, Shimane 690-0017, Japan
*6Tokyo Architectural Construction Branch, Kajima Corporation, 2-14-27 Akasaka, Minato, Tokyo 107-0052, Japan
*7Department of Precision Engineering, The University of Tokyo, 7-3-1 Hongo, Bunkyo, Tokyo 113-8656, Japan

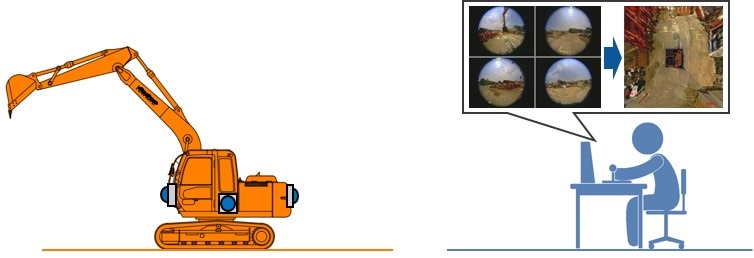 Bird's-eye view system
Bird's-eye view system- [1] A. Fujioka, K. Obata, and Y. Mimura, “Robot Technology in Disaster restoration,” Planning of the methods for construction works, Vol.694, pp. 42-47, 2007.
- [2] C. Yamauchi, T. Kubota, and F. Gonoi, “Development and Application of a Tele-Operated Robot for a Type Mountable to General-Purpose Construction Machines,” J. of Japan Society of Dam Engineers, Vol.14, No.4, pp. 270-284, 2004.
- [3] H. Osumi, S. Sarata, T. Tsubouchi, M. Kurisu, and H. Adachi, “Autonomous Scooping of Rock Pile by Wheel Loader: Abstract of “YAMAZUMI” Project,” Lecture summaries of “Robotics and Mechatronic” 2004, Vol.158, 2004.
- [4] M. Haga and H. Watanabe, “Digging control system for hydraulic excavator or Digging support function for hydraulic excavator – Hydraulic excavator equipped with the function which restricts the digging area using external reference signal –,” Construction Machinery and Equipment, Vol.39, No.10, pp. 19-22, 2003.
- [5] H. Yamamoto, Y. Ishimatsu, T. Yamaguchi, K. Uesaka, K. Aritomi, and Y. Tananka, “Introduction to The General Technology Development Project: Research and Development of Advanced Execution Technology by Remote Control Robot and Information Technology,” 23rd ISARC2006, pp. 24-29, 2006.
- [6] T. Yamaguchi and H. Yamamoto, “Motion Analysis of Hydraulic Excavator in Excavating and Loading Work for Autonomous Control,” 23rd ISARC2006, pp. 602-607, 2006.
- [7] H. Yamamoto, Y. Ishimatsu, S. Ageishi, N. Ikeda, K. Endo, M. Masuda, M. Uchida, and H. Yamaguchi, “Example of Experimental Use of 3D Measurement System for Construction Robot Based on Component Design Concept,” 23rd ISARC2006, pp. 252-257, 2006.
- [8] H. Shao, H. Yamamoto, Y. Sakaida, T. Yamaguchi, Y. Yanagisawa, and A. Nozue, “Automatic Excavation Planning of Hydraulic Excavator,” Intelligent Robotics and Applications, 2008ICIRA, pp. 1201-1211, 2008.
- [9] H. Yamamoto, M, Moteki, H. Shao, T. Ootuki, Y. Yanagisawa, Y. Sakaida, A. Nozue, T. Yamaguchi, and S. Yuta, “Development of the Autonomous Hydraulic Excavator Prototype Using 3-D Information for Motion Planning and Control,” 2010 IEEE/SICE Int. Symposium on System Integration (SII2010), Dec. 21-22, 2010.
- [10] T. Yamaguchi, T. Yoshida, and Y. Ishimatsu, “Enkaku Sousa ni Okeru Man Masin Inta-fe-su ni Kansuru Zittai Chousa,” Proc. of the 59th Annual Meeting on Japan Society of Civil Engineers, Vol.59, pp. 373-374, 2004 (in Japanese).
- [11] H. Hayashi, T. Tamura, and H. Miki, “Muzinkaseko ni Okeru Tuusin Tien to Tuusin Syuki ga Sekou Kouritu ni Ataeru Eikyou no Bunseki to Kaizen Teian,” Proc. of the Heisei 21st Symposium on Japan Construction Machinery and Constraction Association, No.23, pp. 119-124, 2009 (in Japanese).
- [12] C. Hughes, P. Denny, M. Glavin, and E. Jones, “Equidistant Fisheye Calibration and Rectification by Vanishing Point Extraction,” IEEE Trans. on Pattern Analysis and Machine Intelligence, Vol.32, No.12, pp. 2289-2296, 2010.
- [13] H. Okamoto, A. Khiat, N. Shimomura, and K. Umeda, “Kitipata-n wo Motiita Hukusuu Gyogan Kamera no Gaibu Parame-ta Suitei,” Proc. of the 19th Symposium on Sensing via Image Information, IS2-14, 2013 (in Japanese).
- [14] K. Asari, Y. Ishii, H. Hongo, and H. Kano, “A Practicable Calibration Method for Top View Image Generation,” Proc. of the 13th Symposium on Sensing via Image Information, 1N1-13, 2007 (in Japanese).
- [15]
Supporting Online Materials:[a] http://www.theroboticschallenge.org/ [Accessed July 27, 2014]
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.