Review:
High-Speed Vision and its Application Systems
Taku Senoo, Yuji Yamakawa, Yoshihiro Watanabe,
Hiromasa Oku, and Masatoshi Ishikawa
Graduate School of Information Science and Technology, The University of Tokyo, 7-3-1 Hongo, Bunkyo-ku, Tokyo 113-8656, Japan

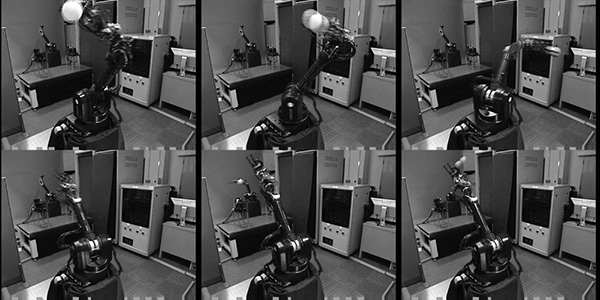 Batting/throwing robots
Batting/throwing robots - [1] M. Ishikawa, A. Morita, and N. Takayanagi, “High Speed Vision System Using Massively Parallel Processing,” 1992 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 373-377, 1992.
- [2] T. Komuro, S. Kagami, and M. Ishikawa, “A Dynamically Reconfigurable SIMD Processor for a Vision Chip,” IEEE J. of Solid-State Circuits, Vol.39, No.1, pp. 265-268, 2004.
- [3] T. Komuro, I. Ishii, M. Ishikawa, and A. Yoshida, “A Digital Vision Chip Specialized for High-speed Target Tracking,” IEEE Trans. on Electron Devices, Vol.50, No.1, pp. 191-199, 2003.
- [4] T. Komuro, A. Iwashita, and M. Ishikawa, “A QVGA-size Pixelparallel Image Processor for 1,000-fps Vision,” IEEE Micro, Vol.29, No.6, pp. 58-67, 2009.
- [5] Y. Nakabo, M. Ishikawa, H. Toyoda, and S. Mizuno, “1ms Column Parallel Vision System and Its Application of High Speed Target Tracking,” Proc. of IEEE Int. Conf. Robotics and Automation, pp. 650-655, 2000.
- [6] T. Komuro, T. Tabata, and M. Ishikawa, “A Reconfigurable Embedded System for 1000 f/s Real-Time Vision,” IEEE Trans. on Circuits and Systems for Video Technology, Vol.20, No.4, pp. 496-504, 2010.
- [7] I. Ishii, T. Tatebe, Q. Gu, Y. Moriue, T. Takaki, and K. Tajima, “2000 fps Real-time Vision System with High-frame-rate Video Recording,” Proc. of the 2010 IEEE Int. Conf. on Robotics and Automation, pp. 1536-1541, 2010.
- [8] Y. Watanabe, T. Komuro, and M. Ishikawa, “A High-speed Vision System forMoment-based Analysis of Numerous Objects,” Proc. of IEEE Int. Conf. on Image Processing, pp. V177-V180, 2007.
- [9] I. Ishii, Y. Nakabo, and M. Ishikawa, “Target Tracking Algorithm for 1ms Visual Feedback System Using Massively Parallel Processing,” Proc. of IEEE Int. Conf. Robotics and Automation, pp. 2309-2314, 1996.
- [10] Y. Watanabe, T. Komuro, S. Kagami, and M. Ishikawa, “Multi-Target Tracking Using a Vision Chip and its Applications to Real-Time Visual Measurement,” J. of Robotics and Mechatronics, Vol.17, No.2 , pp. 121-129, 2005.
- [11] Y. Watanabe, T. Komuro, and M. Ishikawa, “A High-speed Vision System for Moment-based Analysis of Numerous Objects,” Proc. of IEEE Int. Conf. on Image Processing, pp. V177-V180, 2007.
- [12] Y. Watanabe, T. Komuro, and M. Ishikawa, “955-fps Real-Time Shape Measurement of a Moving/Deforming Object Using High-Speed Vision for Numerous-Point Analysis,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 3192-3197, 2007.
- [13] A. Namiki, T. Komuro, and M. Ishikawa, “High Speed Sensory-Motor Fusion Based on Dynamics,” Proc. IEEE, Vol.90, No.7, pp. 1178-1187, 2002.
- [14] A. Namiki, Y. Imai, M. Ishikawa, and M. Kaneko, “Development of a High-speed Multifingered Hand System and Its Application to Catching,” Proc. 2003 IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp. 2666-2671, 2003.
- [15] M. Ishikawa and M. Shimojo, “A Method for Measuring the Center Position of a Two Dimensional Distributed Load Using Pressure-Conductive Rubber,” Trans. The Society of Instrument and Control Engineers, Vol.18, No.7, pp. 730-735, 1982 (in Japanese).
- [16] S. Teshigawara, T. Tsutsumi, Y. Suzuki, and M. Shimojo, “High Speed and High Sensitivity Slip Sensor for Dexterous Grasping,” J. of Robotics and Mechatronics, Vol.24, No.2, pp. 298-310, 2012.
- [17] T. Senoo, A. Namiki, and M. Ishikawa, “High-Speed Batting Using a Multi-Jointed Manipulator,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 1191-1196, 2004.
- [18] T. Senoo, A. Namiki, and M. Ishikawa, “High-speed Throwing Motion Based on Kinetic Chain Approach,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 3206-3211, 2008.
- [19] T. Senoo, A. Namiki, and M. Ishikawa, “Ball Control in High-Speed Batting Motion using Hybrid Trajectory Generator,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 1762-1767, 2006.
- [20] T. Senoo, D. Yoneyama, A. Namiki, and M. Ishikawa, “Tweezers Manipulation Using High-speed Visual Servoing Based on Contact Analysis,” Proc. of IEEE Int. Conf. on Robotics and Biomimetics, pp. 1936-1941, 2011.
- [21] N. Furukawa, A. Namiki, T. Senoo, and M. Ishikawa, “Dynamic Regrasping Using a High-speed Multifingered Hand and a Highspeed Vision System,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 181-187, 2006.
- [22] Y. Yamakawa, A. Namiki, M. Ishikawa, and M. Shimojo, “Knotting Manipulation of a Flexible Rope Using a High-speed Multifingered Hand and High-speed Visual and Tactile Sensory Feedback,” J. of the Robotics Society of Japan, Vol.27, No.9, pp. 1016-1024, 2009.
- [23] Y. Yamakawa, A. Namiki, M. Ishikawa, and M. Shimojo, “Knotting Plan based on Synthesis of Manipulation Skills with Consideration of Robot Hand Mechanism and Motion,” J. of the Robotics Society of Japan, Vol.31, No.3, pp. 283-291, 2013.
- [24] Y. Yamakawa, A. Namiki, and M. Ishikawa, “Dynamic Manipulation of a Flexible Rope using a High-speed Robot Arm,” J. of the Robotics Society of Japan, Vol.31, No.6, pp. 628-638, 2013.
- [25] Y. Yamakawa, A. Namiki, and M. Ishikawa, “Dynamic Folding of a Cloth using a High-speed Multifingered Hand System,” J. of the Robotics Society of Japan, Vol.30, No.2, pp. 225-232, 2012.
- [26] J. M. Shepard, M. C. Towner, J. Lei, and P. Abbeel, “Cloth Grasp Point Detection based on Multiple-View Geometric Cues with Application to Robotic Towel Folding,” Proc. 2010 IEEE Int. Conf. on Robotics and Automation, pp. 2308-2315, 2010.
- [27] T. Nakashima, Y. Watanabe, T. Komuro, and M. Ishikawa, “Book Flipping Scanning,” Adjunct Proc. of 22nd Symposium on User Interface Software and Technology, pp. 79-80, 2009.
- [28] Y. Watanabe, M. Tamei, M. Yamada, and M. Ishikawa, “Automatic Page Turner Machine for High-Speed Book Digitization,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 272-279, 2013.
- [29] S. Noguchi, M. Tamei, M. Yamada, Y. Watanabe, and M. Ishikawa, “Real-time 3D page tracking and book status recognition for highspeed book digitization based on adaptive capturing,” IEEE Winter Conf. on Applications of Computer Vision, 2013.
- [30] Y.Watanabe, T. Nakashima, T. Komuro, and M. Ishikawa, “Estimation of Non-rigid Surface Deformation using Developable Surface Model,” Proc. of Int. Conf. on Pattern Recognition, pp. 197-200, 2010.
- [31] Y. Watanabe, K. Itoyama, M. Yamada, and M. Ishikawa, “Digitization of Deformed Documents using a High-speed Multi-camera Array,” Proc. of Asian Conf. on Computer Vision, pp. 394-407, 2012.
- [32] H. Shibayama, Y. Watanabe, and M. Ishikawa, “Reconstruction of 3D Surface and Restoration of Flat Document Image from Monocular Image Sequence,” Proc. of Asian Conf. on Computer Vision, pp. 350-364, 2012.
- [33] K. Okumura, M. Ishii, E. Tatsumi, H. Oku, and M. Ishikawa, “Gaze Matching Capturing for a High-speed Flying Object,” Proc. of Int. Conf. on Instrumentation, Control, Information Technology and System Integration (SICE Annual Conf. 2013), pp. 649-654, 2013.
- [34] K. Okumura, H. Oku, and M. Ishikawa, “High-Speed Gaze Controller for Millisecond-order Pan/tilt Camera,” 2011 IEEE Int. Conf. on Robotics and Automation, pp. 6186-6191, 2011.
- [35] H. Oku, I. Ishii, and M. Ishikawa, “A microscopic visual feedback system,” Systems and Computers in Japan, Vol.35, No.13, pp. 71-79, 2004.
- [36] H. Oku, N. Ogawa, K. Shiba, M. Yoshida, and M. Ishikawa, “How to Track Spermatozoa using High-Speed Visual Feedback,” 30th Annual Int. Conf. of the IEEE Engineering inMedicine and Biology Society (EMBC 2008), pp. 125-128, 2008.
- [37] H. Oku, N. Ogawa, and M. Ishikawa, “Microorganism Tracking Microscope Using High-Speed Vision System,” Seibutsu Butsuri, Vol.49, No.1, pp. 11-14, 2009 (in Japanese).
- [38] H. Oku, M. Ishikawa, Theodorus, and K. Hashimoto, “High-speed autofocusing of a cell using diffraction pattern,” Optics Express, Vol.14, No.9, pp. 3952-3960, 2006.
- [39] S. Makise, H. Oku, and M. Ishikawa, “Serial Algorithm for Highspeed Autofocusing of Cells using Depth From Diffraction (DFDi) Method,” 2008 IEEE Int. Conf. on Robotics and Automation (ICRA 2008), pp. 3124-3129, 2008.
- [40] H. Oku, H. Kiyokawa, T. Yamano, M. Kikkawa, and M. Ishikawa, “Three-Dimensional Visual Tracking of aMotile Cell in Phase Contrast Microscopy,” Proc. of The 17th Symposium on Sensing via Image Information (SSII2011), pp. IS1-11, 2011.
- [41] H. W. Smith and E. J. Davison, “Design of Industrial Regulators,” Proc. IEE, No.119, pp. 1210-1216, 1972.
- [42]
Supporting Online Materials:[a] Ishikawa laboratory, Web page.
http://www.k2.t.u-tokyo.ac.jp/index-e.html
[Accessed February 19, 2014] - [43] [b] Ishikawa laboratory, YouTube channel.
https://www.youtube.com/user/IshikawaLab [Accessed February 19, 2014] - [44] [c] Barrett Technology Inc., Web page.
http://www.barrett.com/robot/products-arm.htm
[Accessed February 1, 2014]
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.