Review:
Views over last 60 days: 1,706
Development of Bottom-Reliant Type Underwater Robots
Toshihisa Naruse
Shonan PV Techno., 49-7 Nakazato, Hiratsuka, Kanagawa 254-0054, Japan
Received:March 11, 2014Accepted:March 31, 2014Published:June 20, 2014
Keywords:bottom-reliant, underwater robot, 2-crawler traveling mechanism, 8-legged walking robot, 4-crawler traveling mechanism
Abstract
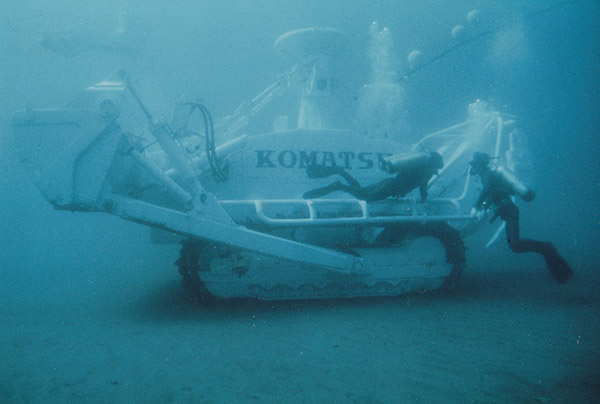
Underwater bulldozer
Cite this article as:T. Naruse, “Development of Bottom-Reliant Type Underwater Robots,” J. Robot. Mechatron., Vol.26 No.3, pp. 279-286, 2014.Data files:
References- [1] T. Ozaki, “Construction Method by Amphibious Bulldozer,” The J. of Civil Engineers, Vol.27, No.2, pp. 141-147, 1986.
- [2] T. Naruse and S. Sawano, “Seabed Travelling Robot,” Work Vessel, No.175, pp. 18-25, 1988.
- [3] T. Naruse and S. Sawano, “8-Legged Underwater Walking Robot,” J. of Robotics and Mechatronics, Vol.5, No.6, pp. 575-578, 1993.
- [4] T. Naruse and S. Harada, “Underwater Trencher,” Mechanization of Construction, No.586, pp. 43-49, 1998.
