Research Paper:
Estimation of Object Handover Position Using Human-Robot Proxemics and Unsupervised Pattern Recognition
Syadza Atika Rahmah† and Naoyuki Kubota

Department of Mechanical System Engineering, Faculty of Systems Design, Tokyo Metropolitan University
6-6 Asahigaoka, Hino, Tokyo 191-0065, Japan
†Corresponding author

The increasing elderly population presents significant challenges in terms of the meeting of their daily care needs. Cognitive decline and reduced arm reflexes following balance loss impede the elderly’s execution of activities of daily living. To address these challenges, robots have emerged as valuable assistants for elderly individuals in their daily activities, including object manipulation, and have the potential to significantly improve the quality of life for the aging population. However, no research has been undertaken to enhance the selection of object handover locations in human-robot interactions by merging topology mapping with both parties’ range of motion, based on personal space. Based on the idea of personal space within human-robot proxemics, this research presents an alternative approach that makes use of topological mapping while taking into account the range of motion of both humans and robots. This research aims to minimize the expenses related to human-robot proximity and to determine the best locations for item handovers in order to discover which locations are optimal. In order to improve object handover locations, this work is a groundbreaking attempt to combine growing neural gas and human proxemics inside a robotic framework. Furthermore, it implies the creation of robot behaviors that resemble human proximity by estimating personal distances and incorporating rule-based requirements for item handover locations by taking into account the mobility ranges of both humans and robots. The simulation findings reported in this work show the ability of the suggested methodology and offer interesting information and prospects for further developments in the area of object handovers by robots.
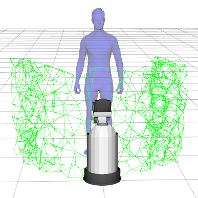
Learning result of human-robot proxemics
- [1] Government of Japan Cabinet Office, “Annual Report on the Aging Society: 2017 (Summary).” https://www8.cao.go.jp/kourei/english/annualreport/index-wh.html [Accessed July 15, 2023]
- [2] Government of Japan Cabinet Office, “Annual Report on the Ageing Society: 2018 (Summary).” https://www8.cao.go.jp/kourei/english/annualreport/index-wh.html [Accessed July 15, 2023]
- [3] Government of Japan Cabinet Office, “Annual Report on the Ageing Society [Summary] FY 2019.” https://www8.cao.go.jp/kourei/english/annualreport/index-wh.html [Accessed July 15, 2023]
- [4] Government of Japan Cabinet Office, “Annual Report on the Ageing Society [Summary] FY2020.” https://www8.cao.go.jp/kourei/english/annualreport/index-wh.html [Accessed July 15, 2023]
- [5] Government of Japan Cabinet Office, “Annual Report on the Ageing Society [Summary] FY2021.” https://www8.cao.go.jp/kourei/english/annualreport/index-wh.html [Accessed July 15, 2023]
- [6] L. C. S. Alves, D. Q. Monteiro, S. R. Bento, V. D. Hayashi, L. N. C. Pelegrini, and F. A. C. Vale, “Burnout Syndrome in Informal Caregivers of Older Adults with Dementia: A Systematic Review,” Dementia & Neuropsychologia, Vol.13, No.4, pp. 415-421, 2019. https://doi.org/10.1590/1980-57642018dn13-040008
- [7] J. G. Hakun and N. F. Johnson, “Dynamic Range of Frontoparietal Functional Modulation is Associated with Working Memory Capacity Limitations in Older Adults,” Brain and Cognition, Vol.118, pp. 128-136, 2017. https://doi.org/10.1016/j.bandc.2017.08.007
- [8] T. B. Weaver, L. E. Hamilton, and C. D. Tokuno, “Age-Related Changes in the Control of Perturbation-Evoked and Voluntary Arm Movements,” Clinical Neurophysiology, Vol.123, No.10, pp. 2025-2033, 2012. https://doi.org/10.1016/j.clinph.2012.03.012
- [9] K. Schurr and L. Ada, “Observation of Arm Behavior in Healthy Elderly People: Implications for Contracture Prevention After Stroke,” Australian J. of Physiotherapy, Vol.52, No.2, pp. 129-133, 2006. https://doi.org/10.1016/s0004-9514(06)70048-4
- [10] A. Nagarkar and S. Kulkarni, “Association Between Daily Activities and Fall in Older Adults: An Analysis of Longitudinal Ageing Study in India (2017–18),” BMC Geriatrics, Vol.22, No.1, Article No.203, 2022. https://doi.org/10.1186/s12877-022-02879-x
- [11] S. Bedaf, G. J. Gelderblom. L. de Witte, D. Syrdal, H. Lehmann, F. Amirabdollahian, K. Dautenhahn, and D. Hewson, “Selecting Services for a Service Robot: Evaluating the Problematic Activities Threatening the Independence of Elderly Persons,” 2013 IEEE 13th Int. Conf. on Rehabilitation Robotics (ICORR), 2013. https://doi.org/10.1109/ICORR.2013.6650458
- [12] U. Reiser, C. Connette, and J. Fischer, “Care-O-bot 3 - Creating a Product Vision for Service Robot Applications by Integrating Design and Technology,” Int. Conf. on Intelligent Robots and Systems, pp. 1992-1998, 2009. https://doi.org/10.1109/IROS.2009.5354526
- [13] R. Qiu, Z. Ji, A. Noyvirt, A. Soroka, R. Setchi, D. T. Pham, S. Xu, N. Shivarov, L. Pigini, G. Arbeiter, F. Weisshardt, B. Graf, M. Mast, L. Blasi, D. Facal, M. Rooker, R. Lopez, D. Li, B. Liu, G. Kronreif, and P. Smrz, “Towards Robust Personal Assistant Robots: Experience Gained in the SRS Project,” Proc. of the 2012 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, 2012. https://doi.org/10.1109/IROS.2012.6385727
- [14] N. Yamada, M. Yani, and N. Kubota, “Interactive Adaptation of Hand-Over Motion by a Robot Partner for Comfort of Receiving,” 2020 IEEE Symp. Series on Computational Intelligence (SSCI), pp. 1899-1904, 2020. https://doi.org/10.1109/SSCI47803.2020.9308289
- [15] N. Kubota, Y. Nojima, F. Kojima, and T. Fukuda, “Multiple Fuzzy State-Value Functions for Human Evaluation Through Interactive Trajectory Planning of a Partner Robot,” Soft Computing, Vol.10, No.10, pp. 891-901, 2006. https://doi.org/10.1007/s00500-005-0015-9
- [16] F. Ardilla, M. Yani, A. A. Saputra, W. Chin, and N. Kubota, “Topological Mapping Based on Perceiving-Acting Cycle in Sharing Cognitive Environments for Robot Partners,” Communications in Information and Systems, Vol.22, No.4, pp. 431-458, 2022. https://doi.org/10.4310/CIS.2022.v22.n4.a1
- [17] E. A. Sisbot and R. Alami, “A Human-Aware Manipulation Planner,” IEEE Trans. on Robotics, Vol.28, No.5, pp. 1045-1057, 2012. https://doi.org/10.1109/TRO.2012.2196303
- [18] J. Mainprice, E. A. Sisbot, T. Simeon, and R. Alami, “Planning Safe and Legible Hand-Over Motions for Human-Robot Interaction,” IARP/IEEE-RAS/EURON Workshop on Technical Challenges for Dependable Robots in Human Environments, 2010.
- [19] M. M. E. Neggers, R. H. Cuijpers, P. A. M. Ruijten, and W. A. IJsselsteijn, “Determining Shape and Size of Personal Space of a Human When Passed by a Robot,” Int. J. of Social Robotics, Vol.14, No.2, pp. 561-572, 2022. https://doi.org/10.1007/s12369-021-00805-6
- [20] A. H. Quispe, H. Ben Amor, and M. Stilman, “Handover planning for every occasion,” 2014 IEEE-RAS Int. Conf. on Humanoid Robots, pp. 431-436, 2014. https://doi.org/10.1109/HUMANOIDS.2014.7041396
- [21] A. Bestick, R. Pandya, R. Bajcsy, and A. D. Dragan, “Learning Human Ergonomic Preferences for Handovers,” 2018 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 3257-3264, 2018. https://doi.org/10.1109/ICRA.2018.8461216
- [22] E. T. Hall, “The Hidden Dimension,” Anchor Books, 1990.
- [23] E. Torta, R. H. Cuijpers, and J. F. Juola, “Design of a Parametric Model of Personal Space for Robotic Social Navigation,” Int. J. of Social Robotics, Vol.5, No.3, pp. 357-365, 2013. https://doi.org/10.1007/s12369-013-0188-9
- [24] T. Amaoka, H. Laga, M. Yoshie, and M. Nakajima, “Personal Space-Based Simulation of Non-Verbal Communications,” Entertainment Computing, Vol.2, No.4, pp. 245-261, 2011. https://doi.org/10.1016/j.entcom.2011.02.006
- [25] N. Klopčar and J. Lenarčič, “Kinematic Model for Determination of Human Arm Reachable Workspace,” Meccanica, Vol.40, No.2, pp. 203-219, 2005. https://doi.org/10.1007/s11012-005-3067-0
- [26] T. Yamamoto, K. Terada, A. Ochiai, F. Saito, Y. Asahara, and K. Murase, “Development of Human Support Robot as the Research Platform of a Domestic Mobile Manipulator,” ROBOMECH J., Vol.6, No.1, 2019. https://doi.org/10.1186/s40648-019-0132-3
- [27] J. Redmon and A. Farhadi, “YOLOv3: An Incremental Improvement,” arXiv:1804.02767, 2018. https://doi.org/10.48550/arXiv.1804.02767
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.