Paper:
Reconnaissance and Confirmation Task Planning of Multiple Fixed-Wing UAVs with Specific Payloads: A Comparison Study
Hao Zhang*, Lihua Dou*,**, Bin Xin*, Ruowei Zhang*, and Qing Wang*
*School of Automation, Beijing Institute of Technology
No.5 Zhongguancun South Street, Haidian District, Beijing 100081, China
**Beijing Advanced Innovation Center for Intelligent Robots and Systems, Beijing Institute of Technology
No.5 Zhongguancun South Street, Haidian District, Beijing 100081, China

In this study, the reconnaissance and confirmation task planning of multiple fixed-wing unmanned aerial vehicles (UAV) with specific payloads, which is an NP-hard problem with strong constraints and mixed variables, is decomposed into two subproblems, task allocation with “payload-target” matching constraints, and fast path planning of the UAV group, for which two mathematical models are respectively established. A bi-layer collaborative solution framework is also proposed. The outer layer optimizes the allocation scheme between the UAVs and targets, whereas the inner layer generates the UAV path and evaluates the outer scheme. In the outer layer, a unified encoding based on the grouping and pairing relationship between UAVs and targets is proposed. The corresponding combinatorial mutation operators are then designed for the representative NSGA-II, MOEA/D-AWA, and DMOEA-ϵC algorithms. In the inner layer, an efficient heuristic algorithm is used to solve the path planning of each UAV group. The simulation results verify the effectiveness of the cooperative bi-layer solution scheme and the combined mutation operators. At the same time, compared with the NSGA-II and MOEA/D-AWA, DMOEA-ϵC can obtain a significantly better Pareto front and can weigh the assigned number of UAVs and the total task completion time to generate more diversified reconnaissance confirmation execution schemes.
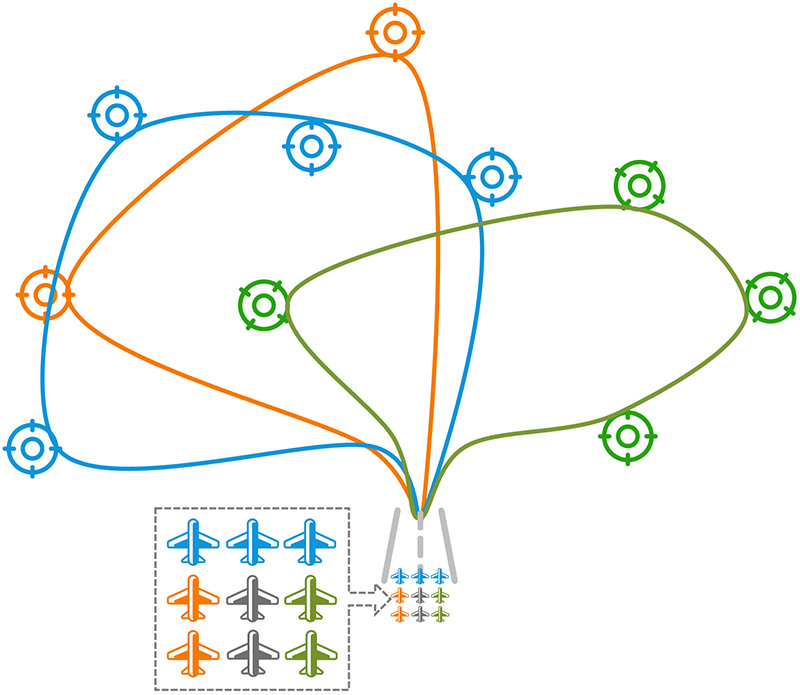
The task planning of UAVs with heterogeneous payloads
- [1] F. Khoshnoud, I. I. Esat, C. W. D. Silva et al., “Self-Powered Solar Aerial Vehicles: Towards Infinite Endurance UAVs,” Unmanned Systems, Vol.8, No.2, pp. 95-117, doi: 10.1142/S2301385020500077, 2020.
- [2] G. Skorobogatov, C. Barrado, and E. Salamí, “Multiple UAV Systems: a Survey,” Unmanned Systems, Vol.8, No.2, pp. 149-169, doi: 10.1142/S2301385020500090, 2020.
- [3] H. Zhang, B. Xin, L. H. Dou et al., “A review of cooperative path planning of an unmanned aerial vehicle group,” Frontiers of Information Technology & Electronic Engineering, Vol.21, pp. 1671-1694, doi: 10.1631/FITEE.2000228, 2020.
- [4] M. Zhao, L. Zhao, X. Su et al., “Improved discrete mapping differential evolution for multiunmanned aerial vehicles cooperative multi-targets assignment under unified model,” Int. J. of Machine Learning and Cybernetics, Vol.8, pp. 765-780, doi: 10.1007/s13042-015-0364-3, 2017.
- [5] M. Guo, B. Xin, J. Chen et al., “Multi-agent coalition formation by an efficient genetic algorithm with heuristic initialization and repair strategy,” Swarm and Evolutionary Computation, Vol.55, doi: 10.1016/j.swevo.2020.100686, 2020.
- [6] X. Zhang, J. Chen, B. Xin et al., “A memetic algorithm for path planning of curvature-constrained UAVs performing surveillance of multiple ground targets,” Chinese J. of Aeronautics, Vol.27, No.3, pp. 622-633, doi: 10.1016/j.cja.2014.04.024, 2014.
- [7] I. Khoufi, A. Laouiti, C. Adjih et al., “UAVs trajectory optimization for data pick up and delivery with time window,” Drones, Vol.5, No.2, doi: 10.3390/drones5020027, 2021.
- [8] Z. Xu, E. Zhang, and Q. Chen, “Rotary unmanned aerial vehicles path planning in rough terrain based on multi-objective particle swarm optimization,” J. of Systems Engineering and Electronics, Vol.31, No.1, pp. 130-141, doi: 10.21629/JSEE.2020.01.14, 2020.
- [9] K. Deb, A. Pratap, S. Agarwal et al., “A fast and elitist multiobjective genetic algorithm: NSGA-II,” IEEE Trans. on Evolutionary Computation, Vol.6, No.2, pp. 182-197, doi: 10.1109/4235.996017, 2002.
- [10] J. Chen, L. Juan, and B. Xin, “DMOEA-εC: Decomposition-Based Multiobjective Evolutionary Algorithm with the ε-Constraint Framework,” IEEE Trans. on Evolutionary Computation, Vol.21, No.5, pp. 714-730, doi: 10.1109/TEVC.2017.2671462, 2017.
- [11] Y. Qi, X. Ma, F. Liu et al., “MOEA/D with adaptive weight adjustment,” Evolutionary Computation, Vol.22, No.2, pp. 231-264, doi: 10.1162/EVCO_a_00109, 2014.
- [12] L. Babel, “New heuristic algorithms for the Dubins traveling salesman problem,” J. of Heuristics, Vol.26, pp. 503-530, doi: 10.1007/s10732-020-09440-2, 2020.
- [13] S. Lu, B. Xin, H. Zhang et al., “Agent-Based Self-Organized Constructive Heuristics for Travelling Salesman Problem,” Proc. of the 59th IEEE Conf. on Decision and Control (CDC), pp. 1164-1169, 2020.
- [14] A. Zhou, Q. Zhang, Y. Jin et al., “A model-based evolutionary algorithm for bi-objective optimization,” Proc. of the IEEE Congress on Evolutionary Computation, Vol.3, pp. 2568-2575, 2005.
- [15] E. Zitzler and L. Thiele, “Multiobjective evolutionary algorithm: a comparative case study and strength Pareto approach,” IEEE Trans. on Evolutionary Computation, Vol.3, No.4, pp. 257-271, doi: 10.1109/4235.797969, 1999.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.