Paper:
Fast Search Strategy for Robots in Dynamic Home Environment
Yuhao Wang, Hao Wu†, Guohui Tian, Guoliang Liu, Fei Lu, and Yanyan Wang
School of Control Science and Engineering, Shandong University
No.17923 Jingshi Road, Lixia District, Jinan, Shandong 250061, China
†Corresponding author

In an unstructured home environment, environmental information is mostly disorganized. It is difficult for a service robot to obtain sufficient service information, which significantly hinders task execution. To solve this problem, a new object search strategy is proposed for improving the speed and accuracy of object search in a complex family environment. In this method, a family-environment knowledge graph is constructed using real environmental information and human knowledge, which plays a guiding role in task execution. The home environment is divided into three levels: functional rooms, static objects, and dynamic objects. The co-occurrence probabilities are obtained from open knowledge sources, including the probabilities between static and dynamic objects and between static objects and functional rooms. They are combined with ontology knowledge based on the home to form prior knowledge of a service robot. Inspired by the human search process, a distance function is introduced to calculate the distance between the robot and target objects for optimizing the search strategy. To improve the robustness of robotic services, we designed a probabilistic update model based on the service tasks and knowledge databases. Experimental results indicated that the proposed search strategy can significantly shorten the search time and increase the search accuracy compared with methods without prior knowledge and the distance function.
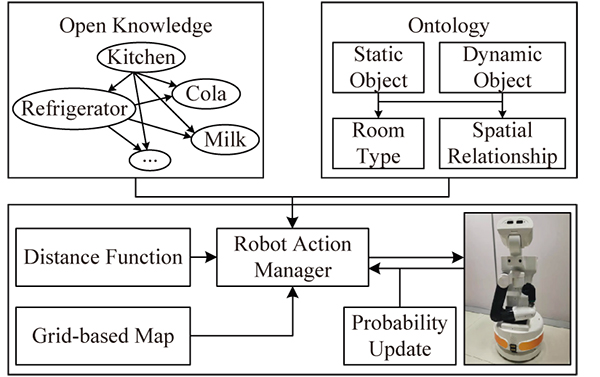
Search system structure
- [1] M. Cho, S. Kwak, I. Laptev, C. Schmid, and J. Ponce, “Unsupervised object discovery and localization in images and videos,” Int. Conf. on Ubiquitous Robots and Ambient Intelligence (URAI), pp. 292-293, 2015.
- [2] J. Wilches, Y. Huang, and Y. Sun, “Generalizing learned manipulation skills in practice,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 9322-9328, 2020.
- [3] P. Khandelwal et al., “Bwibots: A platform for bridging the gap between AI and human-robot interaction research,” The Int. J. of Robotics Research, Vol.36, Issue 5-7, pp. 635-659, 2017.
- [4] A. Aydemir, A. Pronobis, M. Göbelbecker, and P. Jensfelt, “Active visual object search in unknown environments using uncertain semantics,” IEEE Trans. on Robotics, Vol.29, No.4, pp. 986-1002, 2013.
- [5] T. R. Schäfle, M. Mitschke, and N. Uchiyama, “Generation of optimal coverage paths for mobile robots using hybrid genetic algorithm,” J. Robot. Mechatron., Vol.33, No.1, pp. 11-23, 2021.
- [6] R. Toris and S. Chernova, “Temporal persistence modeling for object search,” IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 3215-3222, 2017.
- [7] M. Lorbach, S. Höfer, and O. Brock, “Prior-assisted propagation of spatial information for object search,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2904-2909, 2014.
- [8] Z. Zeng, A. Röfer, and O. C. Jenkins, “Semantic linking maps for active visual object search,” IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 1984-1990, 2020.
- [9] A. Aydemir, K. Sjöö, J. Folkesson, A. Pronobis, and P. Jensfelt, “Search in the real world: Active visual object search based on spatial relations,” IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 2818-2824, 2011.
- [10] P. Chumtong, Y. Mae, K. Ohara et al., “Object search using object co-occurrence relations derived from web content mining,” Intelligent Service Robotics, Vol.7, No.1, pp. 1-13, 2014.
- [11] C. Landsiedel, V. Rieser, M. Walter, and D. Wollherr, “A review of spatial reasoning and interaction for real-world robotics,” Advanced Robotics, Vol.31, No.5, pp. 222-242, 2017.
- [12] J. Elfring, S. Jansen, R. Molengraft, and M. Steinbuch, “Active object search exploiting probabilistic object-object relations,” Robot Soccer World Cup, pp. 13-24, 2013.
- [13] W. Li, H. Wu, and G. Tian, “Object recognition and localization for indoor service robot based on belonging relationship,” J. of Computer-Aided Design and Computer Graphics, Vol.30, No.12, pp. 2335-2343, 2018 (in Chinese).
- [14] B. C. Russell, A. Torralba, K. P. Murphy, and W. T. Freeman, “Labelme: A database and web-based tool for image annotation,” Int. J. of Computer Vision, Vol.77, No.1, pp. 157-173, 2008.
- [15] L. Kunze, M. Beetz, M. Saito, H. Azuma, K. Okada, and M. Inaba, “Searching objects in large-scale indoor environments: A decision-theoretic approach,” IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 4385-4390, 2012.
- [16] R. Gupta and M. J. Kochenderfer, “Common sense data acquisition for indoor mobile robots,” Association for the Advancement of Artificial Intelligence (AAAI), pp. 605-610, 2004.
- [17] J. Pages, L. Marchionni, and F. Ferro, “TIAGo: The modular robot that adapts to different research needs,” Int. Workshop on Robot Modularity, pp. 1-4, 2016.
- [18] G. Grisetti, C. Stachniss, and W. Burgard, “Improved techniques for grid mapping with Rao-Blackwellized particle filters,” IEEE Trans. on Robotics, Vol.23, No.1, pp. 34-46, 2007.
- [19] S. Ren, K. He, R. Girshick, and J. Sun, “Faster R-CNN: Towards real-time object detection with region proposal networks,” IEEE Trans. on Pattern Analysis and Machine Intelligence, Vol.39, No.6, pp. 1137-1149, 2017.
- [20] N. Koenig and A. Howard, “Design and use paradigms for Gazebo, an open-source multi-robot simulator,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Vol.3, pp. 2149-2154, 2004.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.