Paper:
Synthesis and Prototyping of a 6-dof Parallel Robot for the Automatic Performance of Assembly Tasks
Jérôme Landuré*, Clément Gosselin*, Thierry Laliberté*, and Muhammad E. Abdallah**
*Laboratoire de Robotique, Department of Mechanical Engineering, Université Laval
1065 Avenue de la médecine, Québec, Qc G1V0A6, Canada
**Manufacturing Systems Research Lab., General Motors Research and Development
GM Technical Center, Warren, MI 48092, USA

This paper presents the development of a 6-dof parallel robot for the performance of assembly tasks in a human-robot collaborative environment. The architecture and design of the robot are selected such that the robot is mechanically backdrivable. Thereby, the robot can physically interact with an environment or with humans without requiring the use of a force/torque sensor, which is the main objective of this work. The architecture of the robot is first described and its kinematic model is established. The Jacobian matrices are derived and an algorithm is presented for the determination of its workspace. The force capabilities of the robot are then established based on a proposed formulation. A prototype of the robot is presented and control schemes are developed, including a controller based on a vision system. Finally, a video demonstrating the experimental validation of the robot accompanies this paper. The video qualitatively demonstrates the interaction capabilities of the robot.
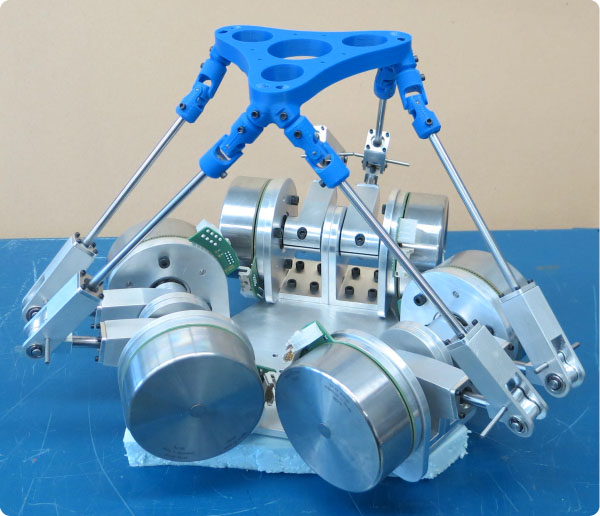
Novel 6-dof 6-URS parallel robot
- [1] J. Krüger, T. K. Lien, and A. Verl, “Cooperation of human and machines in assembly lines,” CIRP annals, Vol.58, No.2, pp. 628-646, 2009.
- [2] A. Campeau-Lecours, P.-L. Belzile, T. Laliberté, S. Foucault, B. Mayer-St-Onge, D. Gao, and C. Gosselin, “An articulated assistive robot for intuitive hands-on-payload manipulation,” Robotics and Computer-Integrated Manufacturing, Vol.48, pp. 182-187, 2017.
- [3] G. R. Luecke, K.-L. Tan, and S. Mahrt, “Control of lift assist devices for performance enhancement,” Mobile Robots XV and Telemanipulator and Telepresence Technologies VII (Proc. of SPIE), Vol.4195, pp. 260-272, 2001.
- [4] P. D. Labrecque, T. Laliberte, S. Foucault, M. E. Abdallah, and C. Gosselin, “uMan: A Low-Impedance Manipulator for Human-Robot Cooperation Based on Underactuated Redundancy,” IEEE/ASME Trans. on Mechatronics, 2017.
- [5] S. M. Rahman, R. Ikeura, and H. Yu, “Novel biomimetic control of a power assist robot for horizontal transfer of objects,” 2011 IEEE Int. Conf. on Robotics and Biomimetics (ROBIO), pp. 2181-2186, 2011.
- [6] G. Liu, Z. Xi, and J.-M. Lien, “Nearly convex segmentation of polyhedra through convex ridge separation,” Computer-Aided Design, Vol.78, pp. 137-146, 2016.
- [7] A. H. Adiwahono, B. Saputra, T. W. Chang, and Z. X. Yong, “Autonomous stair identification, climbing, and descending for tracked robots,” 2014 13th Int Conf. on Control Automation Robotics & Vision (ICARCV), pp. 48-53, 2014.
- [8] J. Mure-Dubois and H. Hügli, “Embedded 3D vision system for automated micro-assembly,” Two- and Three-Dimensional Methods for Inspection and Metrology IV (Proc. of SPIE), Vol.6382, pp. 1-11, 2008.
- [9] R. Ahmad and P. Plapper, “Safe and Automated Assembly Process using Vision assisted Robot Manipulator,” Procedia CIRP, Vol.41, pp. 771-776, 2016.
- [10] G. Gogu, ”Structural synthesis of parallel robots,” Solid Mechanics and its Applications book series, Volume 930, Springer, 2008.
- [11] K. Waldron, S.-L. Wang, and S. Bolin, “A study of the Jacobian matrix of serial manipulators,” J. of Mechanical Design, Vol.107, No.2, pp. 230-237, 1985.
- [12] K. Cleary and T. Arai, “A prototype parallel manipulator: Kinematics, construction, software, workspace results, and singularity analysis,” Proc. of the 1991 IEEE Int. Conf. on Robotics and Automation, pp. 566-567, 1991.
- [13] G. Liu, Y. Lou, and Z. Li, “Singularities of parallel manipulators: A geometric treatment,” IEEE Trans. on Robotics and Automation, Vol.19, No.4, pp. 579-594, 2003.
- [14] Z. Huang, L. Chen, and Y. Li, “The singularity principle and property of Stewart parallel manipulator,” J. of Robotic Systems, Vol.20, No.4, pp. 163-176, 2003.
- [15] X. Kong and C. M. Gosselin, “Kinematics and singularity analysis of a novel type of 3-CRR 3-DOF translational parallel manipulator,” The Int. J. of Robotics Research, Vol.21, No.9, pp. 791-798, 2002.
- [16] I. Ebrahimi, J. A. Carretero, and R. Boudreau, “3-PRRR redundant planar parallel manipulator: Inverse displacement, workspace and singularity analyses,” Mechanism and Machine Theory, Vol.42, No.8, pp. 1007-1016, 2007.
- [17] J. Gallardo-Alvarado, J. M. Rico-Martínez, and G. Alici, “Kinematics and singularity analyses of a 4-dof parallel manipulator using screw theory,” Mechanism and Machine Theory, Vol.41, No.9, pp. 1048-1061, 2006.
- [18] D. Pai and M.-C. Leu, “Genericity and singularities of robot manipulators,” IEEE Trans. on Robotics and Automation, Vol.8, No.5, pp. 545-559, 1992.
- [19] P. Ben-Horin and M. Shoham, “Application of Grassmann–Cayley algebra to geometrical interpretation of parallel robot singularities,” The Int. J. of Robotics Research, Vol.28, No.1, pp. 127-141, 2009.
- [20] Y. Zhao, “Singularity, isotropy, and velocity transmission evaluation of a three translational degrees-of-freedom parallel robot,” Robotica, Vol.31, No.2, pp. 193-202, 2013.
- [21] D. Kim, W. Chung, and Y. Youm, “Singularity analysis of 6-DOF manipulators with the analytical representation of the determinant,” Proc. 1999 IEEE Int. Conf. on Robotics and Automation, Volume 2, pp. 889-894, 1999.
- [22] J. K. Salisbury and J. J. Craig, “Articulated hands: Force control and kinematic issues,” The Int. J. of Robotics Research, Vol.1, No.1, pp. 4-17, 1982.
- [23] I. A. Bonev and J. Ryu, “Orientation workspace analysis of 6-DOF parallel manipulators,” Proc. of the ASME 1999 Design Engineering Technical Conf., pp. 1-8, 1999.
- [24] B. Siciliano, L. Sciavicco, L. Villani, and G. Oriolo, “Robotics: Modelling, planning and control,” Springer Science & Business Media, 2010.
- [25] D. E. Whitney, “Quasi-static assembly of compliantly supported rigid parts,” J. of Dynamic Systems, Measurement, and Control, Vol.104, No.1, pp. 65-77, 1982.
- [26] A. Q. Keemink, H. v. d. Kooij, and A. H. Stienen, “Admittance control for physical human–robot interaction,” The Int. J. of Robotics Research, Vol.37, No.11, pp. 1421-1444, 2018.
- [27] F. Zhang, “Quaternions and matrices of quaternions,” Linear Algebra and its Applications, Vol.251, pp. 21-57, 1997.
- [28] D. J. Evans, “On the representatation of orientation space,” Molecular physics, Vol.34, No.2, pp. 317-325, 1977.
- [29] D. G. Lowe, “Distinctive image features from scale-invariant keypoints,” Int. J. of Computer Vision, Vol.60, No.2, pp. 91-110, 2004.
- [30] E. Rublee, V. Rabaud, K. Konolige, and G. Bradski, “ORB: An efficient alternative to SIFT or SURF,” 2011 Int. Conf. on Computer Vision, pp. 2564-2571, 2011.
- [31] J. Rekimoto, “Matrix: A realtime object identification and registration method for augmented reality,” Proc. of the 3rd Asia Pacific Computer Human Interaction, pp. 63-68, 1998.
- [32] T. Matsuno, T. Fukuda, and Y. Hasegawa, “Insertion of long peg into tandem shallow hole using search trajectory generation without force feedback,” Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA’04), Volume 2, pp. 1123-1128, 2004.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.